Construction d'une radiocommande !
-
sylvainmahe
- Capitaine
- Messages : 167
- Enregistré le : 06 sept. 2015, 20:30
Construction d'une radiocommande !
Bonjour 
J'ouvre ce sujet pour vous montrer la radiocommande que je fabrique, boîtier, électronique, et logiciel sont faits à partir de zéro (pas de bibliothèque arduino, ni de bibliothèque avr, ni de bibliothèque c++ en supplément du langage lui même, ..), par contre je ne créé pas les manches de la radio (je n'avais qu'une semaine pour faire les usinages).







Le programme de cette radio fait 4036 lignes (et sera téléchargeable bientôt), le principe de ce programme est entièrement basé sur mon système que j'ai développé (MODULE), et est entièrement téléchargeable ici (logiciel + plans des cartes): http://sylvainmahe.xyz/
L'automate programmable est le MODULABLE M32, il est équipé de l'ATmega1284P.
Le composant qui fait la communication 2.4GHz est le nRF24L01+, mon système de programmation comporte une classe dédiée à ce composant, voir ici: http://sylvainmahe.xyz/exampleNrf24l01p.html
Les caractéristiques de la radiocommande:
Depuis les premiers temps ou je pilote des modèles radiocommandés dans des associations d'aéromodélisme jusqu'à aujourd'hui, je me suis souvent demandé et au vu de l'avancée précédente et actuelle en matière d'électronique embarquée:
En fait, cette "lacune" des mémoires de modèles dans les radiocommandes modernes trouve historiquement ses racines dans la conception même des premiers radio-émetteurs/récepteurs. En effet, les premières radiocommandes se contentaient uniquement d'être émetteur d'information, et le modèle étant lui simplement un récepteur. Dans cette situation (unidirectionnelle), il est facile de comprendre que le modèle reste toujours muet.
Plus tard, les concepteurs et divers industriels se sont décidés (au vue de la demande qui augmentait) à ajouter une communication du modèle vers la radiocommande, sur un circuit électronique bien distinct et avec une antenne radio supplémentaire sur le modèle et la radiocommande. C'est un retour air/sol qui a été appelé télémétrie (en rapport avec la télémétrie à l'époque des débuts de la conquête spatiale jusqu'à nos jours).
Une fois cette notion comprise, tout est alors possible. Ma radiocommande dispose d'un maximum de 16 paramètres personnalisés par le modèle, ceci est largement suffisant parce que par définition même, ils sont spécifiques au modèle considéré.
Si vous souhaitez en savoir plus et avoir d'autres explications pour mieux comprendre ce projet, je ne peux que vous conseiller de lire l'article que j'ai écrit sur mon blog qui est un peu plus documenté: http://sylvainmahe.xyz/projectRadioControl.html
J'y explique par exemple "La copie des paramètres d'un modèle", ou bien encore "La vitesse de communication", ce qui peut vous intéresser !
N'hésitez pas si vous avez des questions
J'ouvre ce sujet pour vous montrer la radiocommande que je fabrique, boîtier, électronique, et logiciel sont faits à partir de zéro (pas de bibliothèque arduino, ni de bibliothèque avr, ni de bibliothèque c++ en supplément du langage lui même, ..), par contre je ne créé pas les manches de la radio (je n'avais qu'une semaine pour faire les usinages).
Le programme de cette radio fait 4036 lignes (et sera téléchargeable bientôt), le principe de ce programme est entièrement basé sur mon système que j'ai développé (MODULE), et est entièrement téléchargeable ici (logiciel + plans des cartes): http://sylvainmahe.xyz/
L'automate programmable est le MODULABLE M32, il est équipé de l'ATmega1284P.
Le composant qui fait la communication 2.4GHz est le nRF24L01+, mon système de programmation comporte une classe dédiée à ce composant, voir ici: http://sylvainmahe.xyz/exampleNrf24l01p.html
Les caractéristiques de la radiocommande:
L'interface électromécanique entre l'homme et la machine:- Automate programmable MODULABLE M32 équipé du microcontrôleur ATmega1284P.
- Émetteur/récepteur radio 2.4Ghz (composant nRF24L01+, portée 1km environ).
- Communication bi-directionelle.
- Antenne Trèfle omnidirectionnelle 3 branches.
- Communication par trames de 32 bits.
- Affichage digital avec afficheur à digits MAX7219.
- Buzzer de signalement.
- Système à tolérance de pannes (fail-safe) envoyé au modèle sur 6 bits (0 à 63).
- 1 menu principal + 1 menu des paramètres/réglages.
- Réglage de la tension de batterie faible du modèle (de 0V à 100V).
- Réglage d'une temporisation (de 0s à 3600s).
- Aucune mémoire de modèles (la mémoire est située dans les modèles).
- Possibilité de copier les réglages d'un modèle vers un autre très facilement.
- Jusqu'à 16 paramètres/réglages personnalisés envoyés par le modèle.
- Verrouillage des menus (plus de réglages possibles, ni d'extinction de la radiocommande).
- Affichage de la tension de la batterie de la radiocommande.
- Alarme (visuelle et sonore) niveau de batterie faible de la radiocommande.
- Affichage de la tension de la batterie du modèle.
- Alarme (visuelle et sonore) niveau de batterie faible du modèle (si paramétrée).
- Affichage d'une temporisation (temps d'utilisation du modèle/autre).
- Affichage des trims (verrouillage et remise à 0 possible par le bouton de sélection).
- Affichage d'une télémétrie personnalisée.
- Affichage des paramètres/réglages personnalisés.
- Menu de mise à jour des paramètres/réglages du modèle.
- Allumage ou extinction de la radiocommande ou du modèle dans n'importe quel ordre.
- Accumulateur NIMH (+1.2V par élément) 8S 600mAh (+9.6V).
- Prise de charge de la batterie (XT30).
- Boîtier fermé en Aluminium, Acier inoxydable, bois (contreplaqué 5mm), et Ertalon.
- Dimensions: 214mm x 204mm x 117mm.
Le concept de cette radiocommande:- 2 manches analogiques (1 gaz/rouli + 1 tangage/lacet) sur 10 bits (0 à 1023).
- 4 interrupteurs de trims (3 positions) sur 2 bits chacun (0 à 2).
- 1 interrupteur de coupure moteur/autre (2 positions) sur 1 bit (0 à 1).
- 3 interrupteurs auxiliaires (3 positions) sur 2 bits chacun (0 à 2).
- 1 bouton rotatif auxiliaire sur 10 bits (0 à 1023).
- 1 bouton rotatif de sélection du menu sur 10 bits (0 à 1023).
- 1 bouton poussoir de sélection du menu (2 positions, dont 1 momentanée) sur 1 bit (0 à 1).
- 1 interrupteur d'alimentation maintenue on/off (2 positions).
Depuis les premiers temps ou je pilote des modèles radiocommandés dans des associations d'aéromodélisme jusqu'à aujourd'hui, je me suis souvent demandé et au vu de l'avancée précédente et actuelle en matière d'électronique embarquée:
À ce propos je ne citerais que l'exemple d'un ami au terrain de modélisme sans le nommer, qui par mégarde se trompe assez régulièrement de mémoire de modèles (il vol avec beaucoup de choses). En conséquence cela lui arrive souvent d'écraser ses réglages, ou d'écraser son modèle tout simplement au sens physique du terme !Mais pourquoi donc les radiocommandes du commerce ont'elle des mémoires de modèles ? Les mémoires de modèles permettent en effet de retenir les réglages relatifs à un modèle, dans la mémoire de la radiocommande.
En fait, cette "lacune" des mémoires de modèles dans les radiocommandes modernes trouve historiquement ses racines dans la conception même des premiers radio-émetteurs/récepteurs. En effet, les premières radiocommandes se contentaient uniquement d'être émetteur d'information, et le modèle étant lui simplement un récepteur. Dans cette situation (unidirectionnelle), il est facile de comprendre que le modèle reste toujours muet.
Plus tard, les concepteurs et divers industriels se sont décidés (au vue de la demande qui augmentait) à ajouter une communication du modèle vers la radiocommande, sur un circuit électronique bien distinct et avec une antenne radio supplémentaire sur le modèle et la radiocommande. C'est un retour air/sol qui a été appelé télémétrie (en rapport avec la télémétrie à l'époque des débuts de la conquête spatiale jusqu'à nos jours).
L'avancée en matière de miniaturisation des composants permet aujourd'hui d'avoir dans une même puce un émetteur et un récepteur, qui se sert de la même antenne radio pour communiquer, ces systèmes sont appelés tranceivers (émetteurs/récepteurs).
Cette idée simple permet beaucoup de choses, notamment le fait que c'est le modèle qui envoi des paramètres et réglages personnalisés à la radiocommande, qui à l'origine dispose d'un menu des paramètres et réglages presque vide. La radiocommande se voit alors garnie de paramètres personnalisés relatifs au modèle qui est actuellement en communication avec elle. Elle dispose également de l'affichage de la tension de la batterie du modèle en temps réel, et d'une télémétrie personnalisée en fonction du modèle.Le concept que je développe ici permet de vous expliquer l'idée même de ma radiocommande, celle-ci n'a en effet aucune mémoire de modèles, aillant souhaité aller au bout de ma logique, c'est le modèle qui contient la mémoire !
Une fois cette notion comprise, tout est alors possible. Ma radiocommande dispose d'un maximum de 16 paramètres personnalisés par le modèle, ceci est largement suffisant parce que par définition même, ils sont spécifiques au modèle considéré.
Terminé les réglages et menus à n'en plus finir (souvent la plupart du temps inutilisés) dans les radiocommandes du commerce ! Dans ce que je propose ici, vous disposez des réglages uniquement nécessaires au modèle mis en oeuvre, ce qui facilite grandement son utilisation sur le terrain de modélisme !
Si vous souhaitez en savoir plus et avoir d'autres explications pour mieux comprendre ce projet, je ne peux que vous conseiller de lire l'article que j'ai écrit sur mon blog qui est un peu plus documenté: http://sylvainmahe.xyz/projectRadioControl.html
J'y explique par exemple "La copie des paramètres d'un modèle", ou bien encore "La vitesse de communication", ce qui peut vous intéresser !
N'hésitez pas si vous avez des questions
Modifié en dernier par sylvainmahe le 17 août 2017, 16:19, modifié 1 fois.
-
djul

- Chevalier Jedi
- Messages : 2120
- Enregistré le : 19 août 2007, 19:38
- Localisation : région lilloise
Re: Construction d'une radiocommande !
Pfouahh quel projet !! Chapeau !!
28 ans, région lilloise
www.RCHC.fr -> distributeur KDS / GAUI /KST/ skookum
xk110
MiniP : Kst / mks , msh 6s, yge msh 60, beastx
GAUI X5 V2 : kst X20 , scorpion 4025/ tribunus, beastx
Futaba T16sz
Phoenix 5/ NeXT
www.RCHC.fr -> distributeur KDS / GAUI /KST/ skookum
xk110
MiniP : Kst / mks , msh 6s, yge msh 60, beastx
GAUI X5 V2 : kst X20 , scorpion 4025/ tribunus, beastx
Futaba T16sz
Phoenix 5/ NeXT
-
pachy

- Armageddon
- Messages : 38360
- Enregistré le : 08 nov. 2012, 10:22
- Localisation : Velaux
Re: Construction d'une radiocommande !
Impressionnant !
Mais pour paramétrer les modèles, j ai pas compris comment tu fais... avec un ordi directement connecté sur le rx et/ou le fc ?
Mais pour paramétrer les modèles, j ai pas compris comment tu fais... avec un ordi directement connecté sur le rx et/ou le fc ?

The Meeting Heli4 2013/2014/2015/2016/2017/2019..., j'y étais!!!
-
ludaero

- Armageddon
- Messages : 23846
- Enregistré le : 19 juin 2012, 15:59
Re: Construction d'une radiocommande !
Wouaou projet de dingue bravo, elle n'est pas trop lourde la radio vu l'épaisseur du boitier?? (même si je suppose que c'est de l'alu?)
-
DCH49
- Capitaine
- Messages : 182
- Enregistré le : 17 févr. 2014, 20:21
Re: Construction d'une radiocommande !
Là ça ne rigole plus mais très intérréssant. 


-
Yoy24

- Armageddon
- Messages : 23299
- Enregistré le : 29 juin 2010, 15:33
Re: Construction d'une radiocommande !
Yop)
Oui super intéressant...!!!
Oui super intéressant...!!!
¨¨¨¨¨¨  - Vaucluse -
- Vaucluse -  - Compy300 -
- Compy300 -  - Atom 500 - ¨¨¨¨¨¨
- Atom 500 - ¨¨¨¨¨¨
----------------- Hitec Aurora 9X Mode2-
Hitec Aurora 9X Mode2-  -Héli-X 6.1-
-Héli-X 6.1-
----------------------------The Meeting Heli4 2013/14/15..., j'y étais!!! ------------------------------
- Vaucluse - - Compy300 - - Atom 500 - ¨¨¨¨¨¨-----------------
Hitec Aurora 9X Mode2- -Héli-X 6.1-----------------------------The Meeting Heli4 2013/14/15..., j'y étais!!! ------------------------------
-
john-steed

- Général
- Messages : 348
- Enregistré le : 10 janv. 2017, 20:52
- Localisation : Belgique
Re: Construction d'une radiocommande !
Chapeau bas. Ca c'est du travail.
Sim : Heli-X.
Radio : DX6i - Q X7
Heli : nano-cps (mort) - Blade 200SRX - XK K110 - Goblin Fireball (en construction)
Radio : DX6i - Q X7
Heli : nano-cps (mort) - Blade 200SRX - XK K110 - Goblin Fireball (en construction)
-
will
- Chevalier Jedi
- Messages : 1630
- Enregistré le : 18 janv. 2012, 12:37
Re: Construction d'une radiocommande !
Lol merci pour le partage...
un autre niveau de compréhension du bazar... ça change des post "j'arrive pas à binder mon récepteur **** à ma radio *****
On se sent un peu naze quand on lit ça.... pourquoi je suis une grosse quiche en électronique?
pourquoi je suis une grosse quiche en électronique?
un autre niveau de compréhension du bazar... ça change des post "j'arrive pas à binder mon récepteur **** à ma radio *****
On se sent un peu naze quand on lit ça....
Protos 500, ar 7200
ALZRC Devil 420/ neuron
GAUI X7 formula, module spirit
Radio DEVO 8 S en deviation 5.0 / taranis QX7 / frsky xlite pro
Avions en tout genre... racer, acro, planeurs...
ALZRC Devil 420/ neuron
GAUI X7 formula, module spirit
Radio DEVO 8 S en deviation 5.0 / taranis QX7 / frsky xlite pro
Avions en tout genre... racer, acro, planeurs...
-
Sp@r0

- Maître Jedi
- Messages : 3529
- Enregistré le : 09 sept. 2016, 20:27
- Localisation : Eure et Loire
Re: Construction d'une radiocommande !
C'est un très beau projet ! Et une belle réalisation chapeau !
Personnellement j'ai abandonné les frameworks perso je préfère contribuer aux existants ou faire des forks Concernant l'objectif de développer "from stratch" c'est toujours intéressant mais l'assembleur c'est encore mieux
Concernant l'objectif de développer "from stratch" c'est toujours intéressant mais l'assembleur c'est encore mieux
Perso je serais partie sur des composants plus moderne type SoC ESP8266/EMW3165 ou encore mieux avec les nouveaux SoC en Narrowband type Lora ou autre (bien que pas encore super répandu ...)
Personnellement j'ai abandonné les frameworks perso je préfère contribuer aux existants ou faire des forks
Perso je serais partie sur des composants plus moderne type SoC ESP8266/EMW3165 ou encore mieux avec les nouveaux SoC en Narrowband type Lora ou autre (bien que pas encore super répandu ...)
Ma page perso : viewtopic.php?f=2&t=65202
Mes machines : xk k100 / Oxy2 Neuron Core / Goblin Fireball Standard Neuron puis Kbar et bientôt Brain2/ Devil 380 Neuron Core / Mingda 5 Neuron / Trex 700E V2 DFC Neuron
Mes machines : xk k100 / Oxy2 Neuron Core / Goblin Fireball Standard Neuron puis Kbar et bientôt Brain2/ Devil 380 Neuron Core / Mingda 5 Neuron / Trex 700E V2 DFC Neuron
-
sylvainmahe
- Capitaine
- Messages : 167
- Enregistré le : 06 sept. 2015, 20:30
Re: Construction d'une radiocommande !
Bonjour,
Merci pour vos encouragements
Pour répondre dans l'ordre:
Mais pour paramétrer les modèles, j ai pas compris comment tu fais... avec un ordi directement connecté sur le rx et/ou le fc ?
Dans le microcontrôleur qui équipe l'automate programmable à bord du modèle, je programme (1 seule fois à la conception du projet) tout ce que je veux, l’algorithme de vol, le fait que je souhaite que ce modèle communique des paramètres perso à la radio, etc... Dans le cas présent les premiers tests en vol seront sur ce quadri également perso:

Qui fonctionnait avec ma FUTABA T12FG et dont le programme de vol est dispo ici: http://sylvainmahe.xyz/projectQuadcopter.html
Dans ce présent cas, la radiocommande recevra ces paramètres, à régler dans la radio (ils seront tous à 0 au départ):
elle n'est pas trop lourde la radio vu l'épaisseur du boitier?? (même si je suppose que c'est de l'alu?)
En fait elle est un peu plus lourdre que ma FUTABA T12FG, mais pas beaucoup plus finalement. Je peux disposer une sangle si jamais à l'utilisation c'est un problème
"j'arrive pas à binder mon récepteur **** à ma radio *****
Lol, oui ça me fait sourire c'est sûr, mais il y a une étape pour tout. Moi aussi à l'époque j'ai lu les notices de mes récepteurs/radio pour "binder". À ce propos, ce que j'explique dans mon article c'est que si ma radio à besoin des paramètres du modèle (à son allumage après avoir cliqué sur "on air" (à l'antenne)), et qu'aucun modèle n'est allumé, elle affiche "binding", et attends. Vous pouvez passer cette étape si finalement vous ne souhaitez pas récupérer les paramètres du modèle...
j'ai abandonné les frameworks perso je préfère contribuer aux existants ou faire des forks Concernant l'objectif de développer "from stratch" c'est toujours intéressant mais l'assembleur c'est encore mieux
Perso je serais partie sur des composants plus moderne type SoC ESP8266/EMW3165 ou encore mieux avec les nouveaux SoC en Narrowband type Lora ou autre (bien que pas encore super répandu ...)
En fait, cette phrase: "je serais partie", est facile, mais le mieux c'est "je vais le faire"
De même que le langage assembleur, pour ma part j'ai programmé un petit peu en assembleur mes microcontrôleurs (les registres GPIO, TIMERS et interruptions) pour essayer, ça marche bien, mais j'ai presque envie de dire, ça sert à rien mise à part pédagogiquement ! La ce projet MODULE, j'ai mis 3 ans à l'écrire et le concevoir de façon acharné et quasiment ininterrompu (ça fait 4 ans que je ne fait même plus de modélisme ni être inscrit dans un club en partie pour développer ça), donc en assembleur, non merci. Mise à part sortir le projet dans 30 ans, et la perte de temps et de moyens qui va avec, je ne vois pas l'intérêt, si c'est pour gagner quelques cycles processeur et les perdre en neurones et en cheveux gris tout ça pour aller dans la tombe...
Si tu souhaites créer par toi même en assembleur, ou bien convertir en assembleur mon travail, libre à toi, tout est dispo ici: http://sylvainmahe.xyz/understandWhatIsModule.html et ici: http://sylvainmahe.xyz/howToInstallModule.html
Si également tu souhaites fabriquer une radiocommande en te servant du composant ESP8266 plutôt que nRF24L01+ (ce dernier étant au grand malheur de la communauté des programmeurs affublé de bibliothèques sur le net toutes moisies (y a qu'à voir les problématiques que les gens rencontrent partout sur le net avec)), libre à toi de le faire
Pour ce qui est des contributions, la en l’occurrence mon projet MODULE n'est pas clôturé, mais est finalisé, au sens ou pour mes projets futurs je n'ai plus aucune fonction à rajouter pour les réaliser. J'ai eu une demande de rajouter une classe pour la gestion de la carte SD (c'est assez simple à faire mais j'ai pas encore trop le temps et pas de carte sd libre pour tester ça). Une classe avec un composant qui gère un gps sera pas mal un jour aussi, mais pour l'instant j'en ai personnellement pas l'utilité.
Après tout ça est mon point de vue personnel, ça vaut ce que ça vaut, peut être ça ne vaut que de la merde, mais je me serais exprimé sur ton intervention Après, merci pour le commentaire au passage, c'est très aimable de te part, et je te souhaites toi aussi de t'amuser en programmation et développement
Voila je pense avoir répondu grossièrement aux questions, bon je retourne au boulo, je suis en train de réécrire le programme du quadricoptère qui fonctionnait avec mon ancienne radio pour le mettre avec la nouvelle, j'ai bossé juste 1 heure dessus hier, et la c'est presque fini mise à part 2 ou 3 lignes de code à rajouter
Merci pour vos encouragements
Pour répondre dans l'ordre:
Mais pour paramétrer les modèles, j ai pas compris comment tu fais... avec un ordi directement connecté sur le rx et/ou le fc ?
Dans le microcontrôleur qui équipe l'automate programmable à bord du modèle, je programme (1 seule fois à la conception du projet) tout ce que je veux, l’algorithme de vol, le fait que je souhaite que ce modèle communique des paramètres perso à la radio, etc... Dans le cas présent les premiers tests en vol seront sur ce quadri également perso:
Qui fonctionnait avec ma FUTABA T12FG et dont le programme de vol est dispo ici: http://sylvainmahe.xyz/projectQuadcopter.html
Dans ce présent cas, la radiocommande recevra ces paramètres, à régler dans la radio (ils seront tous à 0 au départ):
J'explique pas les paramètres, mais je pense que certains devinent à quoi ils serventSETUP_FREQUENCY_ESC = 1000;
SETUP_CUT_ESC = 100;
SETUP_MIN_ESC = 129;
SETUP_MAX_ESC = 248;
SETUP_SPEED_PITCH = 340;
SETUP_SPEED_ROLL = 340;
SETUP_SPEED_YAW = 340;
SETUP_GAIN_PITCH = 97;
SETUP_GAIN_ROLL = 94;
SETUP_GAIN_YAW = 97;
SETUP_TRAVEL_PITCH_ROLL_VS_YAW = 40;
SETUP_THRUST_PROPELLER = 90;
SETUP_LOCK = 60;
SETUP_LIMIT_THROTTLE = 90;
elle n'est pas trop lourde la radio vu l'épaisseur du boitier?? (même si je suppose que c'est de l'alu?)
En fait elle est un peu plus lourdre que ma FUTABA T12FG, mais pas beaucoup plus finalement. Je peux disposer une sangle si jamais à l'utilisation c'est un problème
"j'arrive pas à binder mon récepteur **** à ma radio *****
Lol, oui ça me fait sourire c'est sûr, mais il y a une étape pour tout. Moi aussi à l'époque j'ai lu les notices de mes récepteurs/radio pour "binder". À ce propos, ce que j'explique dans mon article c'est que si ma radio à besoin des paramètres du modèle (à son allumage après avoir cliqué sur "on air" (à l'antenne)), et qu'aucun modèle n'est allumé, elle affiche "binding", et attends. Vous pouvez passer cette étape si finalement vous ne souhaitez pas récupérer les paramètres du modèle...
j'ai abandonné les frameworks perso je préfère contribuer aux existants ou faire des forks
Perso je serais partie sur des composants plus moderne type SoC ESP8266/EMW3165 ou encore mieux avec les nouveaux SoC en Narrowband type Lora ou autre (bien que pas encore super répandu ...)
En fait, cette phrase: "je serais partie", est facile, mais le mieux c'est "je vais le faire"
De même que le langage assembleur, pour ma part j'ai programmé un petit peu en assembleur mes microcontrôleurs (les registres GPIO, TIMERS et interruptions) pour essayer, ça marche bien, mais j'ai presque envie de dire, ça sert à rien mise à part pédagogiquement ! La ce projet MODULE, j'ai mis 3 ans à l'écrire et le concevoir de façon acharné et quasiment ininterrompu (ça fait 4 ans que je ne fait même plus de modélisme ni être inscrit dans un club en partie pour développer ça), donc en assembleur, non merci. Mise à part sortir le projet dans 30 ans, et la perte de temps et de moyens qui va avec, je ne vois pas l'intérêt, si c'est pour gagner quelques cycles processeur et les perdre en neurones et en cheveux gris tout ça pour aller dans la tombe...
Si tu souhaites créer par toi même en assembleur, ou bien convertir en assembleur mon travail, libre à toi, tout est dispo ici: http://sylvainmahe.xyz/understandWhatIsModule.html et ici: http://sylvainmahe.xyz/howToInstallModule.html
Si également tu souhaites fabriquer une radiocommande en te servant du composant ESP8266 plutôt que nRF24L01+ (ce dernier étant au grand malheur de la communauté des programmeurs affublé de bibliothèques sur le net toutes moisies (y a qu'à voir les problématiques que les gens rencontrent partout sur le net avec)), libre à toi de le faire
Pour ce qui est des contributions, la en l’occurrence mon projet MODULE n'est pas clôturé, mais est finalisé, au sens ou pour mes projets futurs je n'ai plus aucune fonction à rajouter pour les réaliser. J'ai eu une demande de rajouter une classe pour la gestion de la carte SD (c'est assez simple à faire mais j'ai pas encore trop le temps et pas de carte sd libre pour tester ça). Une classe avec un composant qui gère un gps sera pas mal un jour aussi, mais pour l'instant j'en ai personnellement pas l'utilité.
Après tout ça est mon point de vue personnel, ça vaut ce que ça vaut, peut être ça ne vaut que de la merde, mais je me serais exprimé sur ton intervention
Voila je pense avoir répondu grossièrement aux questions, bon je retourne au boulo, je suis en train de réécrire le programme du quadricoptère qui fonctionnait avec mon ancienne radio pour le mettre avec la nouvelle, j'ai bossé juste 1 heure dessus hier, et la c'est presque fini mise à part 2 ou 3 lignes de code à rajouter
-
sylvainmahe
- Capitaine
- Messages : 167
- Enregistré le : 06 sept. 2015, 20:30
Re: Construction d'une radiocommande !
Petite note cependant, sur ce quadricoptère je ne réalise pas les ESC, (ni les moteurs, ni les hélices).
Les ESC sont des KISS ESC 18A sur ce projet.
Néanmoins en parallèle il y a quelques mois, j'ai commencé la conception de mes propres contrôleurs de moteur brushless, ça fonctionne pas mal, mais j'ai encore pas mal de boulo pour l'amélioration de la digitalisation du BEMF sur ce projet:



C'est actuellement toujours en prototype, c'est pour ça que la carte est grosse
Ça fonctionne avec MODULE bien évidement, le code source ne sera pas dispo tant que ce ne sera pas monté sur le quadri, donc y a le temps d'ici la
Les ESC sont des KISS ESC 18A sur ce projet.
Néanmoins en parallèle il y a quelques mois, j'ai commencé la conception de mes propres contrôleurs de moteur brushless, ça fonctionne pas mal, mais j'ai encore pas mal de boulo pour l'amélioration de la digitalisation du BEMF sur ce projet:
C'est actuellement toujours en prototype, c'est pour ça que la carte est grosse
Ça fonctionne avec MODULE bien évidement, le code source ne sera pas dispo tant que ce ne sera pas monté sur le quadri, donc y a le temps d'ici la
-
sylvainmahe
- Capitaine
- Messages : 167
- Enregistré le : 06 sept. 2015, 20:30
Re: Construction d'une radiocommande !
J'ai mis en ligne sur mon site une version du programme de vol du quadri pour la voltige 3D si vous êtes intéressé.
Voir les nouvelles caractéristiques de mon quadri:
Voir les nouvelles caractéristiques de mon quadri:
Dès que tout ça est fini de tester je ferais une vidéo- Automate programmable MODULABLE M32 équipé du microcontrôleur ATmega644P.
- Émetteur/récepteur radio 2.4Ghz (composant nRF24L01+).
- Communication bi-directionelle.
- Antenne Trèfle omnidirectionnelle 4 branches (gain 7dB).
- Communication par trames de 32 bits.
- Gyroscope MPU6050.
- Buzzer de signalement.
- Système à tolérance de pannes (fail-safe) envoyé par la radiocommande sur 6 bits (0 à 63).
- Contrôleurs de moteurs sans charbons KISS ESC 2-5S 24A Race Edition.
- Moteurs sans charbons TIGER MOTORS MN2206 2000kV.
- Hélices 3D Graupner 6" x 3".
- Accumulateur Lithium/Polymère TURNIGY 4S 2200mAh (+14.8V).
- Tension de la batterie envoyée à la radiocommande sur 10 bits (0 à 1023).
- Allumage ou extinction du modèle ou de la radiocommande dans n'importe quel ordre.
- Châssis en tubes d'aluminium 10mm x 12mm.
- Entres-axes moteurs: 372mm x 372mm.
-
MaYeuT

- DETRAQUEUR
- Messages : 9598
- Enregistré le : 22 déc. 2009, 17:29
Re: Construction d'une radiocommande !
Modifié en dernier par MaYeuT le 04 oct. 2017, 10:11, modifié 1 fois.
Marne (51) - 35 ans
K110 - Oxy3 - Goblin 500 & 700C - Protos 380 & Max
Graupner MZ24
Hyperion Duo+
RF 7.5 & Next
---------------------------The Meeting Heli4 2013, 2014, 2015 & 2016..., j'y étais!!! --------------------------
Lynx Team Pilot
K110 - Oxy3 - Goblin 500 & 700C - Protos 380 & Max
Graupner MZ24
Hyperion Duo+
RF 7.5 & Next
---------------------------The Meeting Heli4 2013, 2014, 2015 & 2016..., j'y étais!!! --------------------------
Lynx Team Pilot
-
sylvainmahe
- Capitaine
- Messages : 167
- Enregistré le : 06 sept. 2015, 20:30
Re: Construction d'une radiocommande !
Merci pour les encouragements
Si vous avez d'autres questions ou remarques n'hésitez pas, l'idée est de proposer et de partager des points de divergence si il y en a, c'est comme ça qu'on avance aussi.
La je suis en train de rajouter quelques trucs à la radio, comme l'inversion du sens des commandes, qui est un paramètre que l'on a souvent besoin quel que soit le modèle concerné. Et également la "calibration" des potentiomètres de commandes (pour les résistances mini et maxi), pratique quand on place des potars neufs dans la radio. Puisque ceux-ci de part la mécanique même des manches, même si ils ont par exemple une résistance de 5k (comme c'est le cas avec les miens), n'opposent pas une résistance qui va de 0ohm à 5kohms (convertie après de 0 à 1023 avec le convertisseur analogique/numérique du microcontrôleur).
Si vous avez d'autres questions ou remarques n'hésitez pas, l'idée est de proposer et de partager des points de divergence si il y en a, c'est comme ça qu'on avance aussi.
La je suis en train de rajouter quelques trucs à la radio, comme l'inversion du sens des commandes, qui est un paramètre que l'on a souvent besoin quel que soit le modèle concerné. Et également la "calibration" des potentiomètres de commandes (pour les résistances mini et maxi), pratique quand on place des potars neufs dans la radio. Puisque ceux-ci de part la mécanique même des manches, même si ils ont par exemple une résistance de 5k (comme c'est le cas avec les miens), n'opposent pas une résistance qui va de 0ohm à 5kohms (convertie après de 0 à 1023 avec le convertisseur analogique/numérique du microcontrôleur).
-
sylvainmahe
- Capitaine
- Messages : 167
- Enregistré le : 06 sept. 2015, 20:30
Re: Construction d'une radiocommande !
J'ai rajouté à la radio/et aux modèles en paramètres par défaut l'inversion des voies, et les courbes (équivalent à l'exponentiel) sur les gaz, tangage, roulis, et lacet. Ce sont des paramètres utiles tellement communs à bon nombres de modèles... Ils sont bien évidement enregistrés comme tous les autres paramètres dans le modèle. J'ai modifié à ce propos ma fonction de courbe dans MODULE.
J'ai également mieux expliqué certaines parties des fonctionnalités, et rajouté quelques paragraphes (voir notament: "Inversions des voies et courbes": http://www.sylvainmahe.site/projectRadioControl.html
J'attends encore quelques pièces pour tester le tout (radio + quadri) sur le terrain (certaines pièces viennent d’Australie, et c'est pas évident de trouver l'équivalent ailleurs).
Les KISS ESC 24A en mode 3D sont soudés
J'ai également mieux expliqué certaines parties des fonctionnalités, et rajouté quelques paragraphes (voir notament: "Inversions des voies et courbes": http://www.sylvainmahe.site/projectRadioControl.html
J'attends encore quelques pièces pour tester le tout (radio + quadri) sur le terrain (certaines pièces viennent d’Australie, et c'est pas évident de trouver l'équivalent ailleurs).
Les KISS ESC 24A en mode 3D sont soudés
-
Le Docteur

- Armageddon
- Messages : 20338
- Enregistré le : 06 mars 2011, 18:45
- Contact :
Re: Construction d'une radiocommande !
Salut,
Quel projet et quel travail ! tu dois avoir de sacrés connaissances, je suis épaté !
Pour la mémoire du modèle, je crois que Mikado avec sa vbar neo stocke tout coté module justement et plus rien dans la radio. Du coup, on peut se prêter nos machines justes en les bindant.
Quel projet et quel travail ! tu dois avoir de sacrés connaissances, je suis épaté !
Pour la mémoire du modèle, je crois que Mikado avec sa vbar neo stocke tout coté module justement et plus rien dans la radio. Du coup, on peut se prêter nos machines justes en les bindant.
Bien Amicalement,

-
Nicolas3881

- Modo
- Messages : 54296
- Enregistré le : 11 oct. 2012, 13:30
Re: Construction d'une radiocommande !
Bravo, je suis vraiment impressionné !
Je te crois volontiers lorsque tu parles d'années de travail !
Je te crois volontiers lorsque tu parles d'années de travail !
Membre du Rotor Club Alpin !

OXY rep/Lynx team pilot
--------------------The Meeting Heli4 2014, 2015, 2016 et 2017..., j'y étais!!!--------------------
--------------------The Meeting Heli4 2018..., j'y serai !!!--------------------
OXY rep/Lynx team pilot
--------------------The Meeting Heli4 2014, 2015, 2016 et 2017..., j'y étais!!!--------------------
--------------------The Meeting Heli4 2018..., j'y serai !!!--------------------
-
sylvainmahe
- Capitaine
- Messages : 167
- Enregistré le : 06 sept. 2015, 20:30
Re: Construction d'une radiocommande !
Merci pour les encouragements
Intéressant ce que tu dis Le Docteur par rapport au Vbar, il me semble que c'est eux d'ailleurs qui ont "inventés" le flybarless qu'on connaît actuellement. Ils sont souvent en avance.
Malgré tout je pense que les paramètres stockés dans les modules FBL c'est quelque chose d'assez commun, pour la raison suivante, c'est qu'il y a beaucoup de paramètres et que la radiocommande n'y comprendrait rien de toute façon, il faudrait inventer un peu un standard de paramétrage pour que dans les radiocommandes il y a un menu dédié, un peu comme le menu gyro qu'il y a actuellement (pour les gyro d'anticouple), qui pour l'instant se contente juste d'envoyer le bon pwm sur le fil de signal prévu pour régler le gain du gyro, et son mode (conservateur de cap ou non).
Après bien-sûr il y a les smartphones pour paramétrer les modèles, je n'en ai pas pour ma part, je ne suis pas très moderne...
Effectivement Nicolas3881, j'y est passé (intégralement en solo) plus de 3 ans maintenant de façon vraiment acharnée je peux en témoigner, à y passer des journées entières pendant des mois en continue, puisque j'ai souhaité repartir du composant lui même, et d'une programmation sur la base pure du C++ (brut) uniquement, avec le compilateur adapté (avr-gcc) aux architectures des microcontrôleurs mis en oeuvre bien évidement (je ne souhaite pas réinventer un compilateur, cela ne servirait à rien).
Maintenant que je travail comme j'aime à l’appeler à mi-temps (2/8), si je suis du matin, l'après midi est passé à dévelloper mes projets perso, et si je suis de l'après midi au boulo, c'est l'inverse
La je suis en train de réfléchir à intégrer le variomètre à la radiocommande, ça pourrait être pas mal d'entendre les bip bip lorsque le modèle monte ou descend, d'autant plus que j'ai développé le code dans MODULE qui permet de gérer le baromètre BMP180 de chez BOSCH (voir ma classe Bmp180.h dispo: http://www.sylvainmahe.site/howToProgra ... odule.html).
Je vais sans doute rajouter une section "variometre" au menu, dans lequel on pourra définir un inter qui sert à activer ou non les bip bip (si le modèle retourne bien la pression), et la sensibilité des variations d'altitude.
Intéressant ce que tu dis Le Docteur par rapport au Vbar, il me semble que c'est eux d'ailleurs qui ont "inventés" le flybarless qu'on connaît actuellement. Ils sont souvent en avance.
Malgré tout je pense que les paramètres stockés dans les modules FBL c'est quelque chose d'assez commun, pour la raison suivante, c'est qu'il y a beaucoup de paramètres et que la radiocommande n'y comprendrait rien de toute façon, il faudrait inventer un peu un standard de paramétrage pour que dans les radiocommandes il y a un menu dédié, un peu comme le menu gyro qu'il y a actuellement (pour les gyro d'anticouple), qui pour l'instant se contente juste d'envoyer le bon pwm sur le fil de signal prévu pour régler le gain du gyro, et son mode (conservateur de cap ou non).
Après bien-sûr il y a les smartphones pour paramétrer les modèles, je n'en ai pas pour ma part, je ne suis pas très moderne...
Effectivement Nicolas3881, j'y est passé (intégralement en solo) plus de 3 ans maintenant de façon vraiment acharnée je peux en témoigner, à y passer des journées entières pendant des mois en continue, puisque j'ai souhaité repartir du composant lui même, et d'une programmation sur la base pure du C++ (brut) uniquement, avec le compilateur adapté (avr-gcc) aux architectures des microcontrôleurs mis en oeuvre bien évidement (je ne souhaite pas réinventer un compilateur, cela ne servirait à rien).
Maintenant que je travail comme j'aime à l’appeler à mi-temps (2/8), si je suis du matin, l'après midi est passé à dévelloper mes projets perso, et si je suis de l'après midi au boulo, c'est l'inverse
La je suis en train de réfléchir à intégrer le variomètre à la radiocommande, ça pourrait être pas mal d'entendre les bip bip lorsque le modèle monte ou descend, d'autant plus que j'ai développé le code dans MODULE qui permet de gérer le baromètre BMP180 de chez BOSCH (voir ma classe Bmp180.h dispo: http://www.sylvainmahe.site/howToProgra ... odule.html).
Je vais sans doute rajouter une section "variometre" au menu, dans lequel on pourra définir un inter qui sert à activer ou non les bip bip (si le modèle retourne bien la pression), et la sensibilité des variations d'altitude.
-
pachy
- Armageddon
- Messages : 38360
- Enregistré le : 08 nov. 2012, 10:22
- Localisation : Velaux
Re: Construction d'une radiocommande !
Il y a aussi les modules fbl brain2 et spirit qui peuvent être intégralement paramètré par les radios jeti, graupner, futaba et spektrum... il faut un Rx également compatible....
The Meeting Heli4 2013/2014/2015/2016/2017/2019..., j'y étais!!!
-
sylvainmahe
- Capitaine
- Messages : 167
- Enregistré le : 06 sept. 2015, 20:30
Re: Construction d'une radiocommande !
Pour l'instant, je vois mal les menus statiques de ma futaba t12fg se changer (comme par magie) en menus adaptés pour régler mon quadri 
-
pachy
- Armageddon
- Messages : 38360
- Enregistré le : 08 nov. 2012, 10:22
- Localisation : Velaux
Re: Construction d'une radiocommande !
Ah oui pardon, ça ne marche pas avec futaba mais c'est sur que ça marche avec spektrum
The Meeting Heli4 2013/2014/2015/2016/2017/2019..., j'y étais!!!
-
Nicolas3881
- Modo
- Messages : 54296
- Enregistré le : 11 oct. 2012, 13:30
Re: Construction d'une radiocommande !
Les modules flybarless graupner se règlent en télémétrie via la radio et les paramètres sont donc stockés dans le module.
Comme quoi, sylvainmahe, ta radio a tout d'une grande !
Comme quoi, sylvainmahe, ta radio a tout d'une grande !
Membre du Rotor Club Alpin !
OXY rep/Lynx team pilot
--------------------The Meeting Heli4 2014, 2015, 2016 et 2017..., j'y étais!!!--------------------
--------------------The Meeting Heli4 2018..., j'y serai !!!--------------------
OXY rep/Lynx team pilot
--------------------The Meeting Heli4 2014, 2015, 2016 et 2017..., j'y étais!!!--------------------
--------------------The Meeting Heli4 2018..., j'y serai !!!--------------------
-
Le Docteur
- Armageddon
- Messages : 20338
- Enregistré le : 06 mars 2011, 18:45
- Contact :
Re: Construction d'une radiocommande !
Pratique pour compenser le fait que tu en as une petite !Nicolas3881 a écrit : ↑13 sept. 2017, 14:21Les modules flybarless graupner se règlent en télémétrie via la radio et les paramètres sont donc stockés dans le module.
Comme quoi, sylvainmahe, ta radio a tout d'une grande !
Bien Amicalement,
-
Sp@r0
- Maître Jedi
- Messages : 3529
- Enregistré le : 09 sept. 2016, 20:27
- Localisation : Eure et Loire
Re: Construction d'une radiocommande !
Je confirme aussi en sepktrum cela marche très bien (j'ai fait le test avec un brain d'un copain) mais pour l'instant il n'y a que le récepteur SPM4649T qui le supporte à condition d'avoir un module flybarless qui implémente la nouvelle version du SRXL 2.0sylvainmahe a écrit : ↑13 sept. 2017, 12:02Pour l'instant, je vois mal les menus statiques de ma futaba t12fg se changer (comme par magie) en menus adaptés pour régler mon quadri
D'ailleurs spektrum a changé de fusil d'épaule et à décidé de publier les spécifications du xbus et du SRXL pour permettre à qui le veut bien de créer des équipements compatible
Ma page perso : viewtopic.php?f=2&t=65202
Mes machines : xk k100 / Oxy2 Neuron Core / Goblin Fireball Standard Neuron puis Kbar et bientôt Brain2/ Devil 380 Neuron Core / Mingda 5 Neuron / Trex 700E V2 DFC Neuron
Mes machines : xk k100 / Oxy2 Neuron Core / Goblin Fireball Standard Neuron puis Kbar et bientôt Brain2/ Devil 380 Neuron Core / Mingda 5 Neuron / Trex 700E V2 DFC Neuron
-
philippe13
- Chevalier Jedi
- Messages : 2204
- Enregistré le : 13 oct. 2013, 15:45
- Localisation : Tarascon (13 Bouches-du-rhône)
Re: Construction d'une radiocommande !
Salut Nico,Nicolas3881 a écrit : ↑13 sept. 2017, 14:21Les modules flybarless graupner se règlent en télémétrie via la radio et les paramètres sont donc stockés dans le module.
Comme quoi, sylvainmahe, ta radio a tout d'une grande !
en fait si j'ai bien compris ce projet va beaucoup plus loin , car dans son cas le récepteur contient tout et notamment le modèle.
Sur la Graupner faut à minima sélectionner le modèle qui contient les différentes courbes suivant les idle up sur la radio, les expo, D/R, etc..
Là dans ce projet tout est dans le récepteur..donc , (si j'ai bien compris hein
qu'importe que ce soit un hélico un drone un avion, etc..tu touche à rien à la radio.
Le gros avantage c'est justement de ne pas à choisir le modèle dans la radio ..même si avec les radios modernes comme la Graupner, si le récepteur ne correspond pas au modèle sélectionné dans la radio, normalement ça bind pas. (quoi que j'ai jamais fait l'essai)
Trex 450 Pro DFC (450 MX / kst 115mg/ beastx)
Goblin 500 (QUANTUM 4120 1200 / YGE 120 LV / RJX FS-0391HV /Mks Ds 760 /Beastx)
TREX 600 NITRO DFC/ OS 55/Beastx/ Ds610/ ds655 / rce-g600
Goblin Black Nitro 650 ( YS96SRX/MKS HBL950/980/beatsX v4)
Graupner MZ18 hott
Goblin 500 (QUANTUM 4120 1200 / YGE 120 LV / RJX FS-0391HV /Mks Ds 760 /Beastx)
TREX 600 NITRO DFC/ OS 55/Beastx/ Ds610/ ds655 / rce-g600
Goblin Black Nitro 650 ( YS96SRX/MKS HBL950/980/beatsX v4)
Graupner MZ18 hott
-
Lork
- Chevalier Jedi
- Messages : 1746
- Enregistré le : 19 sept. 2007, 22:36
- Localisation : Montpellier
Re: Construction d'une radiocommande !
Il y a du pour et du contre, par exemple pour ce qui est des paramètres qui touchent au feeling personnel (D/R, Expo voir même les courbes) si c'est stocké dans le modèle, dès que tu prêtes ton modèle t'es bon pour le reparamétrer, alors que si c'est stocké dans la radio c'est au bon vouloir de chacun.
Hors de nos jours on règle quoi d'autre dans la radio ? Pour les hélicos la plupart des datas sont stockées dans le module FBL, pour les quadris avec des cartes sous Betaflight/KISS/... ça va encore plus loin il n'y a quasi aucun paramètre dans la radio.
Même du temps du MCPX v1, les 2 courbes étaient stockées dans le module (DX4e pourrie oblige)
Ça n'empêche que c'est un super projet, mais je pense que c'est une erreur de ne pas plus regarder ce qui se fait à côté.
Après ce qu'on ne pourra jamais enlever ce sont les connaissances que tu as acquis en menant ce projet à bien, que ça ne soit utilisé que par toi ou que ton taf soit exploité.
Hors de nos jours on règle quoi d'autre dans la radio ? Pour les hélicos la plupart des datas sont stockées dans le module FBL, pour les quadris avec des cartes sous Betaflight/KISS/... ça va encore plus loin il n'y a quasi aucun paramètre dans la radio.
Même du temps du MCPX v1, les 2 courbes étaient stockées dans le module (DX4e pourrie oblige)
Ça n'empêche que c'est un super projet, mais je pense que c'est une erreur de ne pas plus regarder ce qui se fait à côté.
Après ce qu'on ne pourra jamais enlever ce sont les connaissances que tu as acquis en menant ce projet à bien, que ça ne soit utilisé que par toi ou que ton taf soit exploité.
-
MaYeuT
- DETRAQUEUR
- Messages : 9598
- Enregistré le : 22 déc. 2009, 17:29
Re: Construction d'une radiocommande !
C'est donc comme une Vbarphilippe13 a écrit : ↑13 sept. 2017, 15:31Salut Nico,Nicolas3881 a écrit : ↑13 sept. 2017, 14:21Les modules flybarless graupner se règlent en télémétrie via la radio et les paramètres sont donc stockés dans le module.
Comme quoi, sylvainmahe, ta radio a tout d'une grande !
en fait si j'ai bien compris ce projet va beaucoup plus loin , car dans son cas le récepteur contient tout et notamment le modèle.
Sur la Graupner faut à minima sélectionner le modèle qui contient les différentes courbes suivant les idle up sur la radio, les expo, D/R, etc..
Là dans ce projet tout est dans le récepteur..donc , (si j'ai bien compris hein
qu'importe que ce soit un hélico un drone un avion, etc..tu touche à rien à la radio.
Le gros avantage c'est justement de ne pas à choisir le modèle dans la radio ..même si avec les radios modernes comme la Graupner, si le récepteur ne correspond pas au modèle sélectionné dans la radio, normalement ça bind pas. (quoi que j'ai jamais fait l'essai)

Avec graupner faut choisir le modèle et tout ce qui est dr et expo reste dans la radio.
Marne (51) - 35 ans
K110 - Oxy3 - Goblin 500 & 700C - Protos 380 & Max
Graupner MZ24
Hyperion Duo+
RF 7.5 & Next
---------------------------The Meeting Heli4 2013, 2014, 2015 & 2016..., j'y étais!!! --------------------------
Lynx Team Pilot
K110 - Oxy3 - Goblin 500 & 700C - Protos 380 & Max
Graupner MZ24
Hyperion Duo+
RF 7.5 & Next
---------------------------The Meeting Heli4 2013, 2014, 2015 & 2016..., j'y étais!!! --------------------------
Lynx Team Pilot
-
sylvainmahe
- Capitaine
- Messages : 167
- Enregistré le : 06 sept. 2015, 20:30
Re: Construction d'une radiocommande !
Merci pour vos commentaires et suggestions, vous soulevez des points intéressants et je vais y répondre
Pour ce qui est du module fbl brain2 puisque il en a été question, je veux bien "croire?" qu'il se paramètre intégralement depuis une radio je cite "les jeti, graupner, futaba et spektrum", mais sur le site internet du fabriquant je n'ai pas trouvé de document qui explique ça.
Toutes les futaba, ou faut'il une futaba comme celle ci ? -> https://www.fxmodelrc.com/18-sz-r7008sb-accus-m1-futaba
A un moment il faut être précis dans les affirmations.
Quoi qu'il en soit, radio à plus de 1000euros ou moins, ou module fbl à 169euros, moi ce que je propose pour la partie à bord du modèle c'est un automate programmable qui n'a pas de fonction en particulier (vous pouvez tout faire avec), équipé d'un émetteur/récepteur qui coûte environ 10 à 15 euros de composants, l'automate lui coûtant environ 15 euros de composants également, le tout avec un code source totalement ouvert, et avec pas mal d'explications sur mon site pour pouvoir débuter (voir par exemple ici pour la partie codage radio: http://www.sylvainmahe.site/exampleNrf24l01p.html, ou ici pour la partie servo-moteurs: http://www.sylvainmahe.site/examplePwmWrite.html).
Ça c'est le matériel coté modèle, mais c'est la même chose coté radiocommande, la seule différence matérielle notable étant l'afficheur (le modèle n'en a pas).
Avec mon automate programmable qui coûte 15 euros et le composant nrf24l01+ pour l'émission/réception, la latence maximale est de 500us (0.5ms) dans le pire des cas (c'est le temps d'attente maximum), généralement il ce situe aux alentours de 250us (voir la documentation technique: https://www.nordicsemi.com/eng/Products ... /nRF24L01P).
Peut être à l'avenir je ferais un système simple qui permet à la personne de créer des "utilisateurs" avec des noms. Pour l'instant je trouve qu'un modèle c'est comme une voiture, ça ne se prête pas, après chacun son truc, tout dépend je dirais du nombre de mois de salaire qui nous permettent à un moment donné d'acheter un hélicoptère, c'est toujours pareil
Pour ma part en 15 ans de modélisme j'ai eu 3 hélicos, un raptor 50 que j'ai revendu (après avoir bien servi en voltige 3d), un trex 500 que j'ai toujours, et un quadri perso (qui fait un peu l'objet de ce sujet aujourd'hui puisque adapté de ma futaba à ma radio perso).
En plus du fait que selon votre projet, vous pouvez créer un "CLOUD" (comme disent les jeunes de moins de 32 ans, c'est mon age) de modèles.
En effet si je souhaite piloter avec ma radio un émetteur/récepteur à bord d'un bateau par exemple, et qu'avec un interrupteur j'ouvre les portes d'une écluse, donc il y a 2 émetteurs/récepteurs, avec mon système c'est parfaitement possible, sans aucune modification.
Ce coté "multiceiver" transparent pour l'utilisateur j'ai d’ailleurs complètement oublié de l'expliquer ici: http://www.sylvainmahe.site/exampleNrf24l01p.html
Je vais m'y mettre tout de suite
Est ce qu'un module Vbar à 278euros tu peux le paramétrer avec une futaba t12fg ? J'ai cette radio qui m'a couté 830euros à l'époque et je souhaite paramétrer mon Vbar avec, peux tu m'aider s'il te plaît MaYeuT?
Je souhaite piloter un bateau avec mon Vbar, c'est un bateau qui lance des patates à l'eau pour appater les poissons, je souhaite avoir un paramètre dans ma radio qui est le nombre de patates restantes à bord du bateau, et un paramètre qui permet de modifier le nombre de patates lancées à la fois (paramètre grosse patate et petite patate).
Peux-tu me conseiller pour faire ceci avec mon module Vbar et ma futaba t12fg? Merci d'avance.
Ah oui j'oubliais, je souhaite aussi piloter un robot, et une porte de garage en même temps, comment faire avec mon module Vbar? Merci de ton aide précieuse
...
...
Bon plus sérieusement (même si c'était sérieux), je suis en train de réfléchir à l'implémentation d'un filtre prédictif (en complément de ma classe Filter.h qui est toute simple et que vous pouvez télécharger sur mon site) pour filtrer la pression atmosphérique, ce qui permettra d'avoir le variomètre intégré à la radio (si vous décidez de retourner une pression à la radio).
En effet le signal est super bruité, ma classe Filter.h permet de débruiter pas mal d'entier ou de décimales, avec ça j'arrive à lire mes 3 chiffres avant la virgule qui sans filtre sont illisibles car ils oscillent sauvagement, mais forcément je pense que ce lissage serait mieux avec une petite logique qui prédit les valeurs futures possibles de cette courbe de pression.
J'y travaille donc, et je me replonge dans quelques mathématiques...
Pour ce qui est du module fbl brain2 puisque il en a été question, je veux bien "croire?" qu'il se paramètre intégralement depuis une radio je cite "les jeti, graupner, futaba et spektrum", mais sur le site internet du fabriquant je n'ai pas trouvé de document qui explique ça.
Toutes les futaba, ou faut'il une futaba comme celle ci ? -> https://www.fxmodelrc.com/18-sz-r7008sb-accus-m1-futaba
Même cette spektrum la ? -> https://www.fxmodelrc.com/spektrum-dxe- ... teur-ar610pachy
Ah oui pardon, ça ne marche pas avec futaba mais c'est sur que ça marche avec spektrum
A un moment il faut être précis dans les affirmations.
Quoi qu'il en soit, radio à plus de 1000euros ou moins, ou module fbl à 169euros, moi ce que je propose pour la partie à bord du modèle c'est un automate programmable qui n'a pas de fonction en particulier (vous pouvez tout faire avec), équipé d'un émetteur/récepteur qui coûte environ 10 à 15 euros de composants, l'automate lui coûtant environ 15 euros de composants également, le tout avec un code source totalement ouvert, et avec pas mal d'explications sur mon site pour pouvoir débuter (voir par exemple ici pour la partie codage radio: http://www.sylvainmahe.site/exampleNrf24l01p.html, ou ici pour la partie servo-moteurs: http://www.sylvainmahe.site/examplePwmWrite.html).
Ça c'est le matériel coté modèle, mais c'est la même chose coté radiocommande, la seule différence matérielle notable étant l'afficheur (le modèle n'en a pas).
Le SPM4649T, bon déjà le prix de 54euros, mais passons, ce qui m'interpelle c'est la latence: "La latence de réception est de 11ms".Sp@r0
Je confirme aussi en sepktrum cela marche très bien (j'ai fait le test avec un brain d'un copain) mais pour l'instant il n'y a que le récepteur SPM4649T qui le supporte à condition d'avoir un module flybarless qui implémente la nouvelle version du SRXL 2.0
Avec mon automate programmable qui coûte 15 euros et le composant nrf24l01+ pour l'émission/réception, la latence maximale est de 500us (0.5ms) dans le pire des cas (c'est le temps d'attente maximum), généralement il ce situe aux alentours de 250us (voir la documentation technique: https://www.nordicsemi.com/eng/Products ... /nRF24L01P).
Pas forcément, tu peux très bien avec mon système te créer un paramètre perso qui te sert de condition de vol, et qui bascule d'un groupe de paramètres à un autre. Faut juste bien identifier quels paramètres.Lork
Il y a du pour et du contre, par exemple pour ce qui est des paramètres qui touchent au feeling personnel (D/R, Expo voir même les courbes) si c'est stocké dans le modèle, dès que tu prêtes ton modèle t'es bon pour le reparamétrer, alors que si c'est stocké dans la radio c'est au bon vouloir de chacun.
Peut être à l'avenir je ferais un système simple qui permet à la personne de créer des "utilisateurs" avec des noms. Pour l'instant je trouve qu'un modèle c'est comme une voiture, ça ne se prête pas, après chacun son truc, tout dépend je dirais du nombre de mois de salaire qui nous permettent à un moment donné d'acheter un hélicoptère, c'est toujours pareil
Pour ma part en 15 ans de modélisme j'ai eu 3 hélicos, un raptor 50 que j'ai revendu (après avoir bien servi en voltige 3d), un trex 500 que j'ai toujours, et un quadri perso (qui fait un peu l'objet de ce sujet aujourd'hui puisque adapté de ma futaba à ma radio perso).
Oui tu as bien compris.philippe13
Salut Nico,
en fait si j'ai bien compris ce projet va beaucoup plus loin , car dans son cas le récepteur contient tout et notamment le modèle.
Sur la Graupner faut à minima sélectionner le modèle qui contient les différentes courbes suivant les idle up sur la radio, les expo, D/R, etc..
Là dans ce projet tout est dans le récepteur..donc , (si j'ai bien compris hein
qu'importe que ce soit un hélico un drone un avion, etc..tu touche à rien à la radio.
Le gros avantage c'est justement de ne pas à choisir le modèle dans la radio ..même si avec les radios modernes comme la Graupner, si le récepteur ne correspond pas au modèle sélectionné dans la radio, normalement ça bind pas. (quoi que j'ai jamais fait l'essai)
En plus du fait que selon votre projet, vous pouvez créer un "CLOUD" (comme disent les jeunes de moins de 32 ans, c'est mon age) de modèles.
En effet si je souhaite piloter avec ma radio un émetteur/récepteur à bord d'un bateau par exemple, et qu'avec un interrupteur j'ouvre les portes d'une écluse, donc il y a 2 émetteurs/récepteurs, avec mon système c'est parfaitement possible, sans aucune modification.
Ce coté "multiceiver" transparent pour l'utilisateur j'ai d’ailleurs complètement oublié de l'expliquer ici: http://www.sylvainmahe.site/exampleNrf24l01p.html
Je vais m'y mettre tout de suite
Si "c'est donc comme une Vbar", c'est que tu n'as pas compris mon projet...MaYeuT
C'est donc comme une Vbar
Avec graupner faut choisir le modèle et tout ce qui est dr et expo reste dans la radio.
Est ce qu'un module Vbar à 278euros tu peux le paramétrer avec une futaba t12fg ? J'ai cette radio qui m'a couté 830euros à l'époque et je souhaite paramétrer mon Vbar avec, peux tu m'aider s'il te plaît MaYeuT?
Je souhaite piloter un bateau avec mon Vbar, c'est un bateau qui lance des patates à l'eau pour appater les poissons, je souhaite avoir un paramètre dans ma radio qui est le nombre de patates restantes à bord du bateau, et un paramètre qui permet de modifier le nombre de patates lancées à la fois (paramètre grosse patate et petite patate).
Peux-tu me conseiller pour faire ceci avec mon module Vbar et ma futaba t12fg? Merci d'avance.
Ah oui j'oubliais, je souhaite aussi piloter un robot, et une porte de garage en même temps, comment faire avec mon module Vbar? Merci de ton aide précieuse
...
...
Bon plus sérieusement (même si c'était sérieux), je suis en train de réfléchir à l'implémentation d'un filtre prédictif (en complément de ma classe Filter.h qui est toute simple et que vous pouvez télécharger sur mon site) pour filtrer la pression atmosphérique, ce qui permettra d'avoir le variomètre intégré à la radio (si vous décidez de retourner une pression à la radio).
En effet le signal est super bruité, ma classe Filter.h permet de débruiter pas mal d'entier ou de décimales, avec ça j'arrive à lire mes 3 chiffres avant la virgule qui sans filtre sont illisibles car ils oscillent sauvagement, mais forcément je pense que ce lissage serait mieux avec une petite logique qui prédit les valeurs futures possibles de cette courbe de pression.
J'y travaille donc, et je me replonge dans quelques mathématiques...
-
MaYeuT
- DETRAQUEUR
- Messages : 9598
- Enregistré le : 22 déc. 2009, 17:29
Re: Construction d'une radiocommande !

Modifié en dernier par MaYeuT le 04 oct. 2017, 10:13, modifié 2 fois.
Marne (51) - 35 ans
K110 - Oxy3 - Goblin 500 & 700C - Protos 380 & Max
Graupner MZ24
Hyperion Duo+
RF 7.5 & Next
---------------------------The Meeting Heli4 2013, 2014, 2015 & 2016..., j'y étais!!! --------------------------
Lynx Team Pilot
K110 - Oxy3 - Goblin 500 & 700C - Protos 380 & Max
Graupner MZ24
Hyperion Duo+
RF 7.5 & Next
---------------------------The Meeting Heli4 2013, 2014, 2015 & 2016..., j'y étais!!! --------------------------
Lynx Team Pilot
-
igloo

- Maître Jedi
- Messages : 4374
- Enregistré le : 11 janv. 2010, 23:41
- Localisation : Au nord... du Var
Re: Construction d'une radiocommande !
Ce que je peux garantir, pour m'en servir actuellement, c'est qu'une Graupner à 240€ (MZ18, récepteur G12L inclus) peut paramétrer intégralement un module SPIRIT (140 €). Pour plus de détails, tu peux aller sur le site SPIRIT là.sylvainmahe a écrit :
Pour ce qui est du module fbl brain2 puisque il en a été question, je veux bien "croire?" qu'il se paramètre intégralement depuis une radio je cite "les jeti, graupner, futaba et spektrum", mais sur le site internet du fabriquant je n'ai pas trouvé de document qui explique ça.
-
igloo
- Maître Jedi
- Messages : 4374
- Enregistré le : 11 janv. 2010, 23:41
- Localisation : Au nord... du Var
Re: Construction d'une radiocommande !
Sinon, pour ce qui est des 2 "écoles" qui veulent qu'il vaille mieux tout mémoriser dans le module embarqué ou au contraire laisser le maximum dans l'émetteur et ne conserver dans le module que le minimum (cas de tous les systèmes actuels, quoique Graupner justement, possède des récepteurs programmables sur certains paramètres comme les dual rate, expo... pour compenser les limitations de certains émetteurs en bas de gamme ou certaines applications nécessitant largement plus de voies que l'émetteur, 12 voies et plus), je ne suis pas convaincu que tout mettre dans le module soit le mieux, simplement par pure économie.
Je pars du principe qu'il ne faut laisser que le minimum nécessaire sur le module et partager au mieux les tâches, d'une part pour économiser l'énergie embarquée (quoique non significatif comparé aux besoins de la propulsion) mais surtout parce que les plus grandes capacité de calculs sont plus faciles à faire porter par l'émetteur qui n'est limité ni en poids ni en puissance a priori. Quelles sont ces fonctions? Ce sont celles qui ont besoin des données d'entrée provenant des capteurs de bord. C'est typiquement le cas des modules FBL qui ont besoin des valeurs des capteurs gyroscopiques et il est évident qu'on ne va pas "s"amuser" à communiquer en télémétrie à l'émetteur ces valeurs, pour qu'il calcul les ordres et les renvoie... C'est aussi le cas des paramètres fail safe mais qu'on trouve maintenant à la fois dans les récepteurs de toutes les marques et dans certains modules aussi (le SPIRIT par exemple). Pour le reste, inutile par contre, "d'occuper" le module de bord avec des calculs d'expo, d'anticipation via la vitesse de déplacement du manche, des calculs de mise en forme de données brutes de télémétries, etc...
Sur le plan fonctionnel et sûreté de fonctionnement, c'est au mieux identique car si la liaison radio est perdue, où que soient mémorisés les paramètres ou les calculs, le module/récepteur ne reçoit plus d'ordre et va passer en fail safe. Pour le reste, c'est transparent pour l'utilisateur.
Je pars du principe qu'il ne faut laisser que le minimum nécessaire sur le module et partager au mieux les tâches, d'une part pour économiser l'énergie embarquée (quoique non significatif comparé aux besoins de la propulsion) mais surtout parce que les plus grandes capacité de calculs sont plus faciles à faire porter par l'émetteur qui n'est limité ni en poids ni en puissance a priori. Quelles sont ces fonctions? Ce sont celles qui ont besoin des données d'entrée provenant des capteurs de bord. C'est typiquement le cas des modules FBL qui ont besoin des valeurs des capteurs gyroscopiques et il est évident qu'on ne va pas "s"amuser" à communiquer en télémétrie à l'émetteur ces valeurs, pour qu'il calcul les ordres et les renvoie... C'est aussi le cas des paramètres fail safe mais qu'on trouve maintenant à la fois dans les récepteurs de toutes les marques et dans certains modules aussi (le SPIRIT par exemple). Pour le reste, inutile par contre, "d'occuper" le module de bord avec des calculs d'expo, d'anticipation via la vitesse de déplacement du manche, des calculs de mise en forme de données brutes de télémétries, etc...
Sur le plan fonctionnel et sûreté de fonctionnement, c'est au mieux identique car si la liaison radio est perdue, où que soient mémorisés les paramètres ou les calculs, le module/récepteur ne reçoit plus d'ordre et va passer en fail safe. Pour le reste, c'est transparent pour l'utilisateur.
-
Sp@r0
- Maître Jedi
- Messages : 3529
- Enregistré le : 09 sept. 2016, 20:27
- Localisation : Eure et Loire
Re: Construction d'une radiocommande !
Alors c'est assez simple il y a plusieurs raison qui explique la latence :sylvainmahe a écrit : ↑14 sept. 2017, 11:10Le SPM4649T, bon déjà le prix de 54euros, mais passons, ce qui m'interpelle c'est la latence: "La latence de réception est de 11ms".Sp@r0
Je confirme aussi en sepktrum cela marche très bien (j'ai fait le test avec un brain d'un copain) mais pour l'instant il n'y a que le récepteur SPM4649T qui le supporte à condition d'avoir un module flybarless qui implémente la nouvelle version du SRXL 2.0
Avec mon automate programmable qui coûte 15 euros et le composant nrf24l01+ pour l'émission/réception, la latence maximale est de 500us (0.5ms) dans le pire des cas (c'est le temps d'attente maximum), généralement il ce situe aux alentours de 250us (voir la documentation technique: https://www.nordicsemi.com/eng/Products ... /nRF24L01P).
- les radios de modélisme ont pour vocation de pouvoir être plusieurs .... il ne faut pas saturer la bande passante avec des infos inutile qu'aucun modèle / pilote ne peut exploiter
- les radios moderne utilisent du FHSS ou du DSSS pour éviter les interférences, fiabilité la communication et permettre un nombre important de communication simultané avec différents équipement utilisant la bande 2.4 le nrf24l01 ne permet pas d'utiliser de technologie de saut de fréquence
Question du prix c'est vrai spektrum est un peu chère tu prends un taranis Q7 tu as un protocole très moderne(FHSS) une télécommande qui vaut 90€ avec 16 voies et des récepteurs qui valent moins de 15€ avec la télémétrie ....Je regrette parfois un peu moins choix spektrum d'ailleurs ....mais c'est vrai que c'est super ultra simple a régler !
Ma page perso : viewtopic.php?f=2&t=65202
Mes machines : xk k100 / Oxy2 Neuron Core / Goblin Fireball Standard Neuron puis Kbar et bientôt Brain2/ Devil 380 Neuron Core / Mingda 5 Neuron / Trex 700E V2 DFC Neuron
Mes machines : xk k100 / Oxy2 Neuron Core / Goblin Fireball Standard Neuron puis Kbar et bientôt Brain2/ Devil 380 Neuron Core / Mingda 5 Neuron / Trex 700E V2 DFC Neuron
-
sylvainmahe
- Capitaine
- Messages : 167
- Enregistré le : 06 sept. 2015, 20:30
Re: Construction d'une radiocommande !
Oui bon exemple, si tu regardes au début de la conquête spatiale, certains calculs impossibles à faire dans le temps imparti à bord étaient envoyés bruts au sol, calculés au sol, et retournés vers le satellite ou la sonde. Ça c'était à l'époque.igloo
Je pars du principe qu'il ne faut laisser que le minimum nécessaire sur le module et partager au mieux les tâches, d'une part pour économiser l'énergie embarquée (quoique non significatif comparé aux besoins de la propulsion) mais surtout parce que les plus grandes capacité de calculs sont plus faciles à faire porter par l'émetteur qui n'est limité ni en poids ni en puissance a priori. Quelles sont ces fonctions? Ce sont celles qui ont besoin des données d'entrée provenant des capteurs de bord. C'est typiquement le cas des modules FBL qui ont besoin des valeurs des capteurs gyroscopiques et il est évident qu'on ne va pas "s"amuser" à communiquer en télémétrie à l'émetteur ces valeurs, pour qu'il calcul les ordres et les renvoie... C'est aussi le cas des paramètres fail safe mais qu'on trouve maintenant à la fois dans les récepteurs de toutes les marques et dans certains modules aussi (le SPIRIT par exemple). Pour le reste, inutile par contre, "d'occuper" le module de bord avec des calculs d'expo, d'anticipation via la vitesse de déplacement du manche, des calculs de mise en forme de données brutes de télémétries, etc...
Actuellement dans mon projet, les seuls calculs effectués à bord du modèle sur mon quadri sont ceux utiles au temps réel de mon algorithme de stabilisation. Les courbes (expo, trims, etc...) et autres sont calculés dans la radiocommande.
À noter que partie radio ou modèle peut importe (comme déjà évoqué), dispose exactement de la même puissance de calcul dans mon projet. Et est constitué des mêmes éléments (automate programmable sans fonction particulière).
Concernant le nRF24L01+ si tu en parles à un ingénieur des telecoms, comme j'ai l'occasion de côtoyer en ce moment, il te dira que c'est du DSSS. Ne trouvant pas cette info dans la documentation du composant je ne peux confirmer.Sp@r0
Alors c'est assez simple il y a plusieurs raison qui explique la latence :
- les radios de modélisme ont pour vocation de pouvoir être plusieurs .... il ne faut pas saturer la bande passante avec des infos inutile qu'aucun modèle / pilote ne peut exploiter
- les radios moderne utilisent du FHSS ou du DSSS pour éviter les interférences, fiabilité la communication et permettre un nombre important de communication simultané avec différents équipement utilisant la bande 2.4 le nrf24l01 ne permet pas d'utiliser de technologie de saut de fréquence
Question du prix c'est vrai spektrum est un peu chère tu prends un taranis Q7 tu as un protocole très moderne(FHSS) une télécommande qui vaut 90€ avec 16 voies et des récepteurs qui valent moins de 15€ avec la télémétrie ....Je regrette parfois un peu moins choix spektrum d'ailleurs ....mais c'est vrai que c'est super ultra simple a régler !
Le FHSS qu'en à lui n'est pas une technologie "moderne", ça a été inventé en 1941 pour piloter des torpilles, le saut de fréquence fait que tu ne peux pas détecter la communication car tu n'as pas le temps de te caler sur la fréquence et l'écouter tellement elle saute vite. Par ailleurs la communication est souvent considéré comme du bruit (même pour un calculateur qui écoute) car les sauts sont pseudo-aléatoires, mais sont connus à l'avance de l'émetteur et du récepteur, d’où un peu cette perte d'intérêt qu'en au brouillage si on connaît la séquence effectivement (et donc ne serait plus vu comme du bruit).
Par contre avec le nRF24L01+ tu peux choisir ta fréquence via le registre 0x05 (RF_CH), pour ma part j'ai choisi pile 2.4GHz. Après tout est possible, ce registre étant sur 8 bits - 1 (il y a un bit qu'il faut laisser à 0), tu as donc 128 fréquences possibles. Ensuite il suffit de faire une séquence pseudo aléatoire de saut de fréquence, et voila.
-
sylvainmahe
- Capitaine
- Messages : 167
- Enregistré le : 06 sept. 2015, 20:30
Re: Construction d'une radiocommande !
Bonjour, j'ai écrit un nouveau paragraphe sur mon site pour expliquer une fonctionnalité qui peut vous intéresser: Système multidirectionnel (multiceiver) (voir: http://www.sylvainmahe.site/projectRadioControl.html).
Le système de radiocommande 2.4GHz que je propose ici permet la communication multidirectionnelle entre la radiocommande et un ou plusieurs modèles, autorise le dialogue entre les modèles eux-mêmes (réseau d'émetteurs/récepteurs, ou multiceivers), et rend possible l'ajout de plusieurs émetteurs/récepteurs (tranceivers) embarqués dans un même véhicule (pour les gros modèles notamment).
Tout projet est alors possible, sans même évoquer le modélisme piloté dont il est question ici:
Dans les caractéristiques de la radiocommande j'ai donc rajouté:
- Communication multidirectionnelle vers (sol/air air/sol) et entre (air/air) plusieurs modèles.
- Communication vers périphériques relais pour applications longues distances basse puissance.
Le système de radiocommande 2.4GHz que je propose ici permet la communication multidirectionnelle entre la radiocommande et un ou plusieurs modèles, autorise le dialogue entre les modèles eux-mêmes (réseau d'émetteurs/récepteurs, ou multiceivers), et rend possible l'ajout de plusieurs émetteurs/récepteurs (tranceivers) embarqués dans un même véhicule (pour les gros modèles notamment).
Tout projet est alors possible, sans même évoquer le modélisme piloté dont il est question ici:
Ce principe d'émetteur/récepteur intégré donne également la possibilité à l'utilisateur d'effectuer des communications longues distances en basse puissance d'émission (inférieure à 100mW), ceci par transmission de données de la radiocommande vers des périphériques relais qui se chargent non pas de traiter l'information et de l'utiliser, mais plutôt de la relayer vers d'autres périphériques afin d'atteindre la portée radio vers le modèle.Par exemple des applications robotiques mettant en œuvre des réseaux de robots qui communiquent entre-eux, et bien d'autres projets encore. Libre à vous d'imaginer vos propres applications en fonction de vos besoins !
Il est envisageable d'imaginer un robot d'exploration de décombres hors de portée radio directe avec le poste de pilotage (à cause des bardages métalliques des bâtiments par exemple), mais étant à portée radio de plusieurs relais qui se chargent seulement de transmettre (relayer) les informations aux téléopérateurs.Cette propriété de pouvoir recevoir et émettre avec de multiples périphériques ainsi que de relayer l'information, est effectué de manière complètement transparente pour l'utilisateur ou le programmeur via l'utilisation de ma classe Nrf24l01p.h.
À noter que les paragraphes qui relatent de l'utilisation de ma radiocommande sur mon site font état d'une utilisation avec un seul modèle, car c'est mon application principale (l'aéromodélisme). Néanmoins tout ce qui est expliqué (utilisation des menus, fonctionnalités, etc...) fonctionne avec plusieurs modèles (suivant la logique que vous avez programmé dans leurs microcontrôleurs respectifs bien entendu).Toutes ces propriétés multidirectionnelles (multiceivers) sont à définir non pas dans la radiocommande, mais uniquement à la conception des programmes à bord de vos modèles, robots, et autres systèmes embarqués (libre à chacun de créer une logique en rapport avec le type de système piloté).
Dans les caractéristiques de la radiocommande j'ai donc rajouté:
- Communication multidirectionnelle vers (sol/air air/sol) et entre (air/air) plusieurs modèles.
- Communication vers périphériques relais pour applications longues distances basse puissance.
-
sylvainmahe
- Capitaine
- Messages : 167
- Enregistré le : 06 sept. 2015, 20:30
Re: Construction d'une radiocommande !
J'ai monté hier la dernière version de mes automates programmables 32 entrées/sorties et courant max de 8A qui iront à bord du quadri et de la radiocommande si vous voulez voir:




La régulation de tension est linéaire et est basée sur un simple LM7805 assisté par un transistor Darlington BD646 (schéma inspiré de celui-ci: http://deltajp.pagesperso-orange.fr/mon ... for78.html)
Description et plus de photos sur mon site ici: http://www.sylvainmahe.site/projectModulableM32.html
J'ai monté également une version améliorée de mon buzzer:


Voir description complète et plan de la carte: http://www.sylvainmahe.site/projectBuzzer.html
La régulation de tension est linéaire et est basée sur un simple LM7805 assisté par un transistor Darlington BD646 (schéma inspiré de celui-ci: http://deltajp.pagesperso-orange.fr/mon ... for78.html)
Description et plus de photos sur mon site ici: http://www.sylvainmahe.site/projectModulableM32.html
J'ai monté également une version améliorée de mon buzzer:
Voir description complète et plan de la carte: http://www.sylvainmahe.site/projectBuzzer.html
-
akoirium

- DARK VADOR
- Messages : 5776
- Enregistré le : 02 févr. 2009, 01:33
Re: Construction d'une radiocommande !
Whaou !! c'est du lourd tout ça ... jolis boulot !!
RESPECT !!!
Ton projet me fait rebondir sur une de mes réponse a un autre topic sur un autre projet de radio :
viewtopic.php?f=64&t=65929
Du coup ... je me demande ce que tu pense de la conception d'un " retour de force" sur les manches de la radio pour aider au pilotage.
Perso je trouve l'idée intéressante mais je me doute que sa réalisation risque d' être sacrement plus complexe...
RESPECT !!!
Ton projet me fait rebondir sur une de mes réponse a un autre topic sur un autre projet de radio :
viewtopic.php?f=64&t=65929
Du coup ... je me demande ce que tu pense de la conception d'un " retour de force" sur les manches de la radio pour aider au pilotage.
Perso je trouve l'idée intéressante mais je me doute que sa réalisation risque d' être sacrement plus complexe...
"Une vis foireuse n'existe pas..., mais les bon outils oui !... donc j'ai des outils foireux..." (Moi)
"Software is like sex ... it's better when it's free !!!..." (Linus Torvalds le créateur de linux)
"Software is like sex ... it's better when it's free !!!..." (Linus Torvalds le créateur de linux)
-
sylvainmahe
- Capitaine
- Messages : 167
- Enregistré le : 06 sept. 2015, 20:30
Re: Construction d'une radiocommande !
Merciakoirium a écrit : ↑04 oct. 2017, 10:04Whaou !! c'est du lourd tout ça ... jolis boulot !!
RESPECT !!!
Ton projet me fait rebondir sur une de mes réponse a un autre topic sur un autre projet de radio :
viewtopic.php?f=64&t=65929
Du coup ... je me demande ce que tu pense de la conception d'un " retour de force" sur les manches de la radio pour aider au pilotage.
Perso je trouve l'idée intéressante mais je me doute que sa réalisation risque d' être sacrement plus complexe...
Pour le retour de force, oui c'est une bonne idée, mais peut être pour d'autres applications que le pilotage 3D qui m'intéresse ? Car dans ce pilotage je me demande ce que cela ferait de sentir les manches rigides à chaque figure, genre tic-toc.... Faudrait prévoir la pommade pour les tendinites ou la canal carpien !
Sinon pour voir juste les manches bouger, comme évoqué dans le sujet que tu cites, est-ce que cela aiderait vraiment?
Par contre pour des applications de robotique ça peut être pas mal de sentir les efforts pour éviter de casser le matériel par exemple.
C'est pas prévu dans mon projet, mes manches sont des standard hitec. Je sais qu'il existe des radios pro comme ça avec retour de force.
Un autre retour de force serait possible et utile si on imagine par exemple le vol des planeurs:
Avec un accéléromètre, définir pour tel ou tel modèle que 4G en positif c'est le max admissible, et 2G en négatif également, de sorte qu'une alarme pourrait se déclencher si on arrive à la limite des performances du modèle, et ainsi éviter de casser les ailes. C'est une idée comme ça...
-
akoirium
- DARK VADOR
- Messages : 5776
- Enregistré le : 02 févr. 2009, 01:33
Re: Construction d'une radiocommande !
Pour la 3D c jouable ... bien sure il ne faut pas que les manches soient trop dur si non effectivement ca risque de faire mal aux doigts... mais un leger retour de force ca peu etre apreciable meme en 3d...
Enfin c est une autre histoire a mettre en place ...
Enfin c est une autre histoire a mettre en place ...
"Une vis foireuse n'existe pas..., mais les bon outils oui !... donc j'ai des outils foireux..." (Moi)
"Software is like sex ... it's better when it's free !!!..." (Linus Torvalds le créateur de linux)
"Software is like sex ... it's better when it's free !!!..." (Linus Torvalds le créateur de linux)
-
sylvainmahe
- Capitaine
- Messages : 167
- Enregistré le : 06 sept. 2015, 20:30
Re: Construction d'une radiocommande !
J'ai acheté récemment une alim stabilisée ALR3003 ELC pour finaliser mes différents tests (n'en possédant aucune), mais sans même l'avoir branchée je l'ai démontée pour voir l'intérieur car je me doutais du coté "low cost" du montage en usine (comme beaucoup d'appareils en dessous d'un certain prix).
J'ai donc refait au moins la moitié du câblage car je le trouvais moyen, j'ai également mis la carcasse à la terre avec un autre câble d'alim par sécurité.
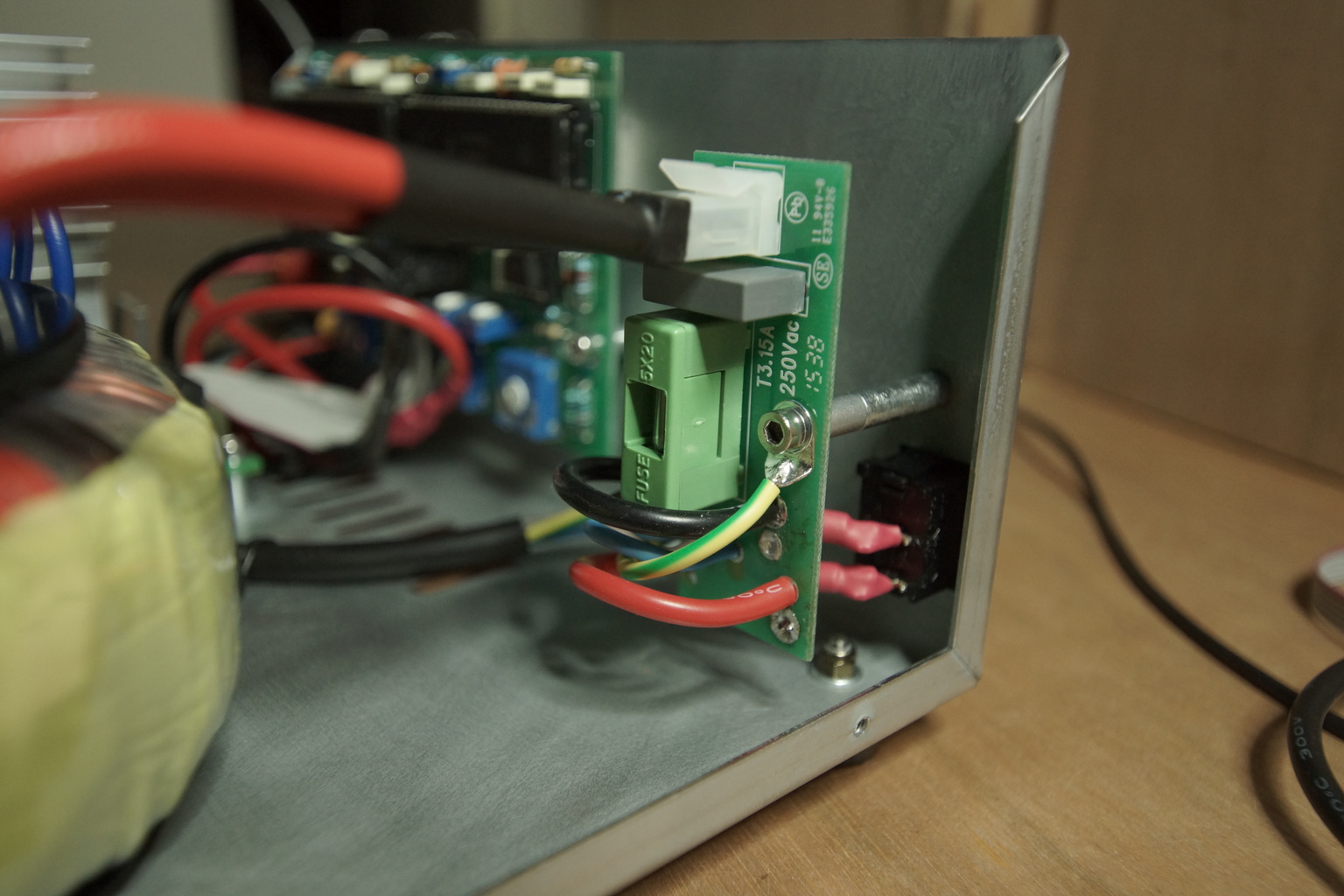
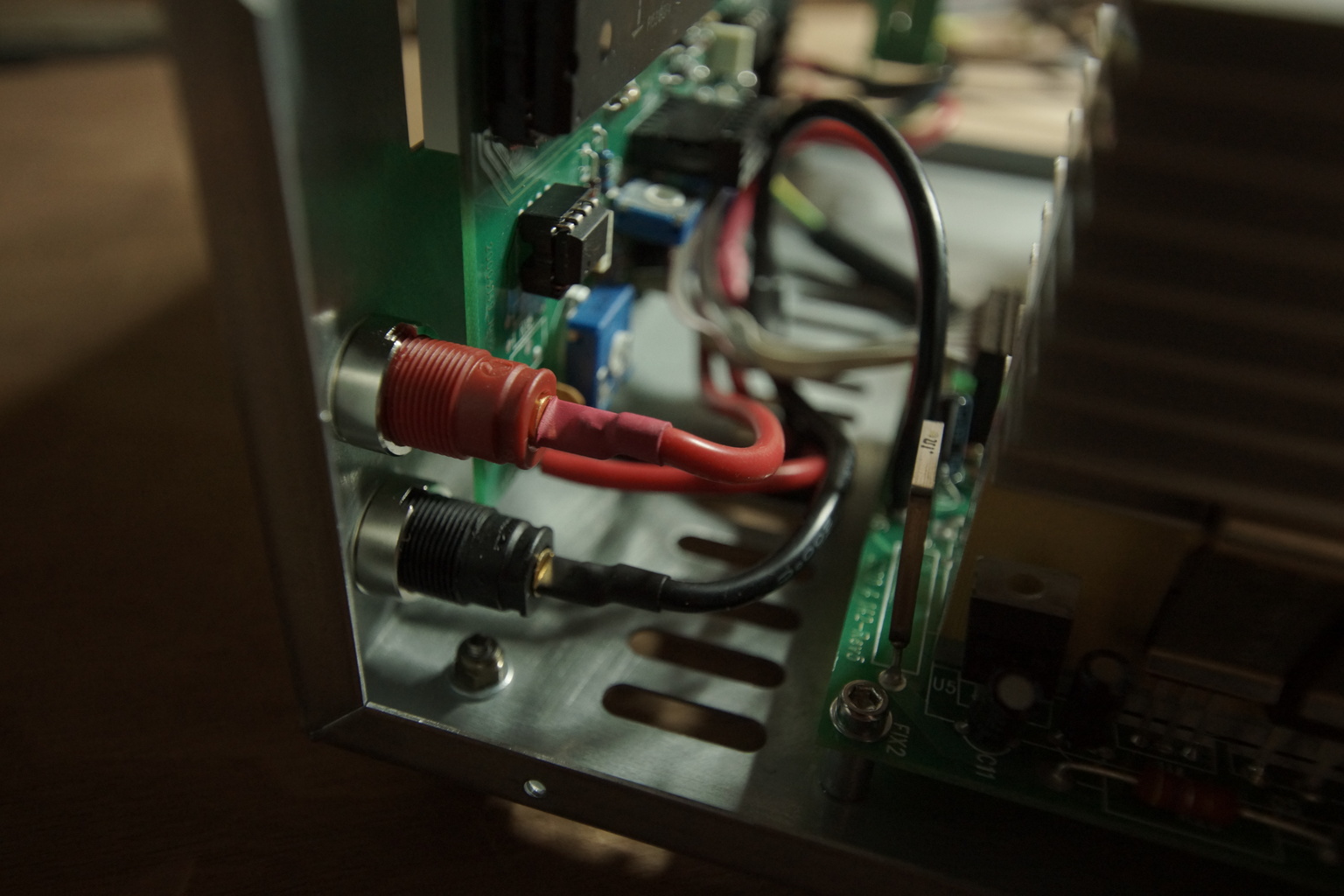
J'ai viré l’autocollant en façade, je trouvais dommage que ce ne soit pas une vraie sérigraphie, j'ai plongé la tôle dans de l'acétone pour dissoudre toute la colle, puis j'ai poncé et brossé le tout.
J'ai changé les connecteurs banane en façade qui étaient soudés à l'arrache, mis 2 vrais "Y" entre les connecteurs banane et les 2 cartes électroniques (une qui gère l'affichage, l'autre la régulation de 0V à 30V). L'interrupteur on/off est changé également, et les boutons de potentiomètres (2 gros pour la tension et l'intensité, 1 petit pour affiner la tension).
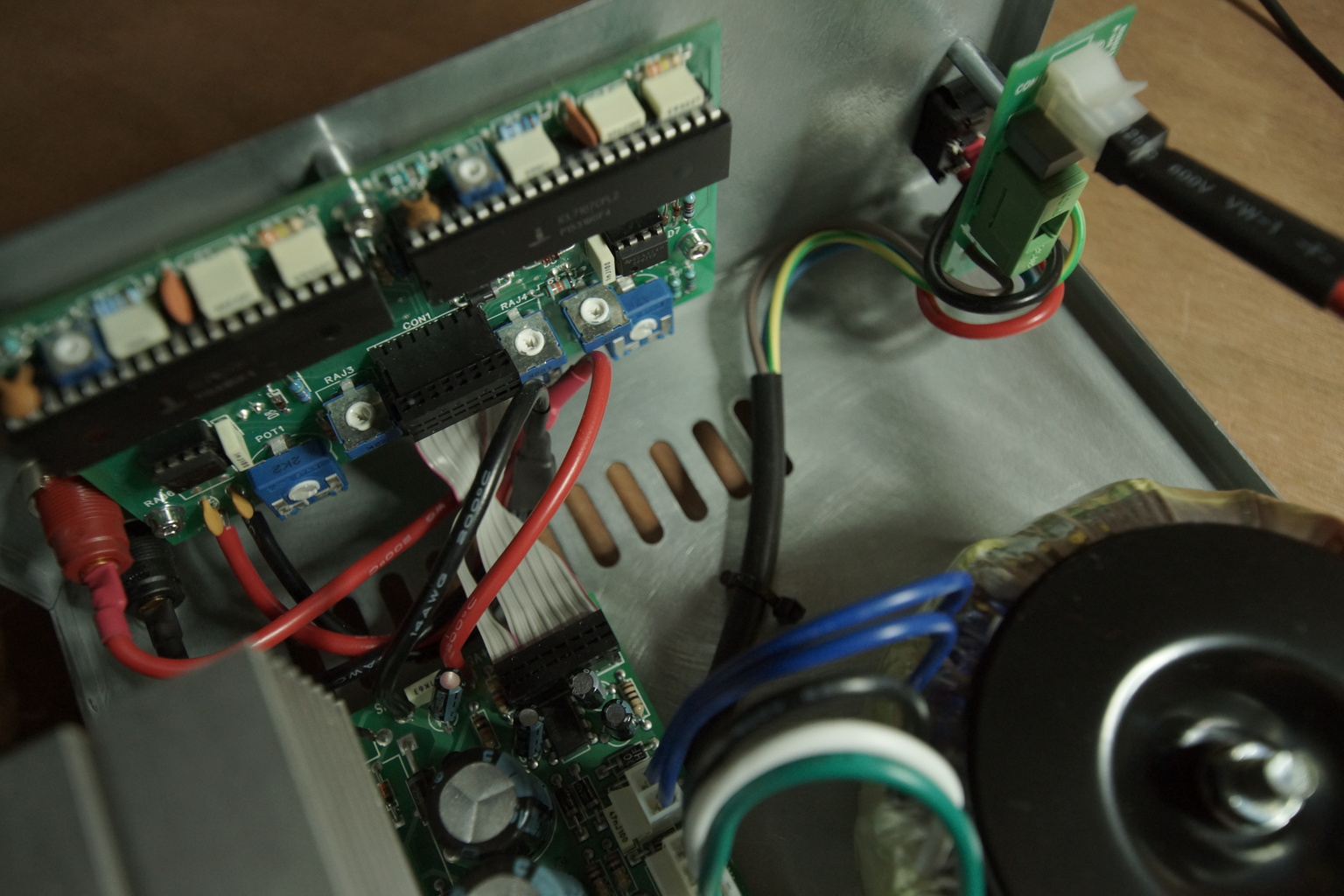
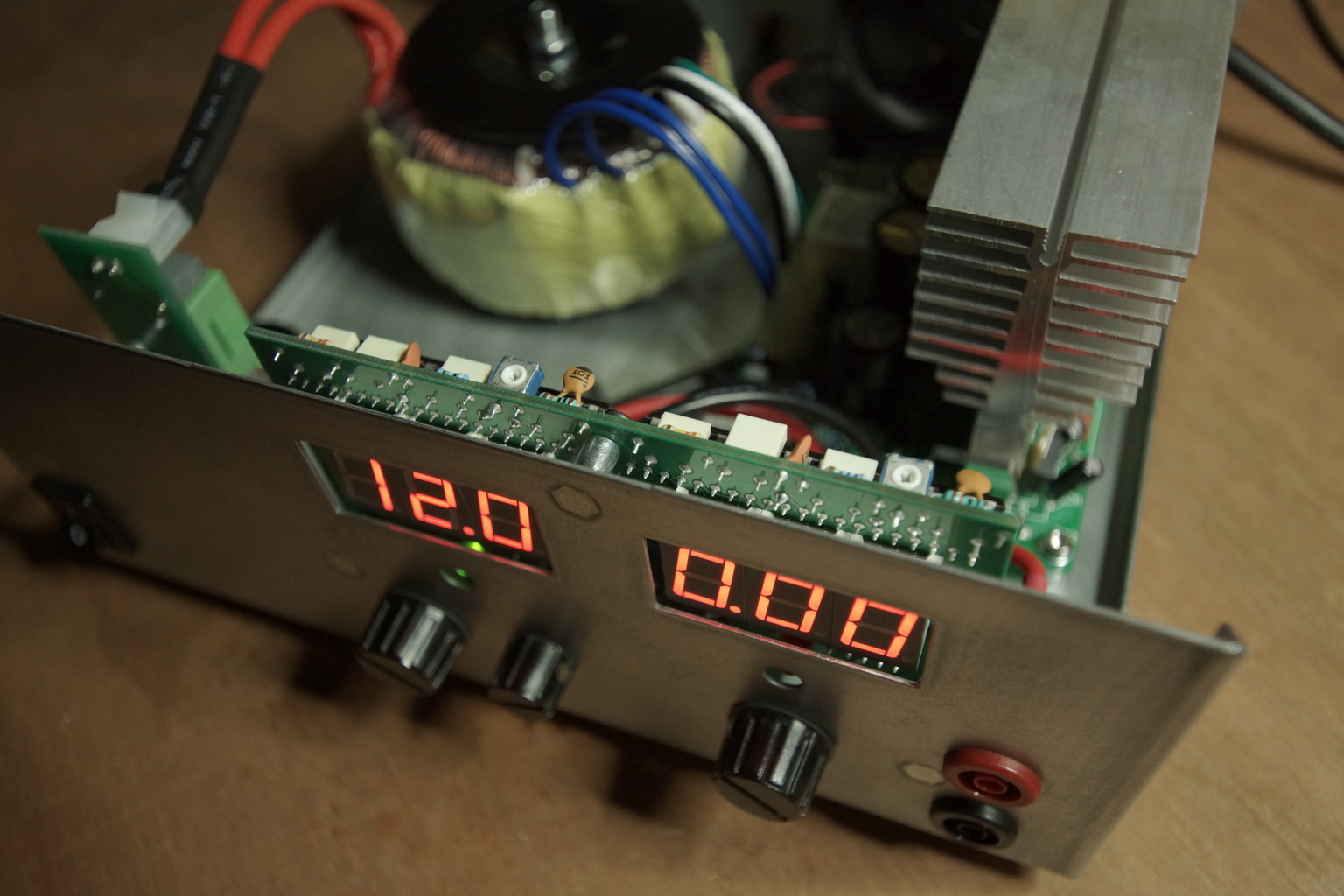
Toute la visserie/rondelle/écrous est aussi changée, car toutes les vis quasiment étaient cruciforme et abîmées au niveau de la tête. J'ai donc mis de la vis M3 inox 6 pans creux pour fixer les cartes et les patins sous le boîtier, et 4 cruciformes à tôle + rondelles pour refermer le tout.
Je pense initialement que l'intérieur de cette alim aurait convenu à pas mal de monde, mais pas à moi.

Au final cette alim est vraiment très précise sur toute sa plage de tension (0V à 30V), et m'a permis de valider (même si j'en étais quasiment sûr) mes nouvelles cartes automates.
Donc j'espère finir ma radiocommande dans les semaines à venir et passer de la phase de tests, au montage définitif.
J'ai donc refait au moins la moitié du câblage car je le trouvais moyen, j'ai également mis la carcasse à la terre avec un autre câble d'alim par sécurité.
J'ai viré l’autocollant en façade, je trouvais dommage que ce ne soit pas une vraie sérigraphie, j'ai plongé la tôle dans de l'acétone pour dissoudre toute la colle, puis j'ai poncé et brossé le tout.
J'ai changé les connecteurs banane en façade qui étaient soudés à l'arrache, mis 2 vrais "Y" entre les connecteurs banane et les 2 cartes électroniques (une qui gère l'affichage, l'autre la régulation de 0V à 30V). L'interrupteur on/off est changé également, et les boutons de potentiomètres (2 gros pour la tension et l'intensité, 1 petit pour affiner la tension).
Toute la visserie/rondelle/écrous est aussi changée, car toutes les vis quasiment étaient cruciforme et abîmées au niveau de la tête. J'ai donc mis de la vis M3 inox 6 pans creux pour fixer les cartes et les patins sous le boîtier, et 4 cruciformes à tôle + rondelles pour refermer le tout.
Je pense initialement que l'intérieur de cette alim aurait convenu à pas mal de monde, mais pas à moi.
Au final cette alim est vraiment très précise sur toute sa plage de tension (0V à 30V), et m'a permis de valider (même si j'en étais quasiment sûr) mes nouvelles cartes automates.
Donc j'espère finir ma radiocommande dans les semaines à venir et passer de la phase de tests, au montage définitif.
-
sylvainmahe
- Capitaine
- Messages : 167
- Enregistré le : 06 sept. 2015, 20:30
Re: Construction d'une radiocommande !
Bonjour, je donne des nouvelles du projet.
Je me suis aperçu que je n'arriverais pas à refermer le boîtier de la radio tout en faisant des passages de câbles qui ne se prennent pas dans les mécanismes des manches.
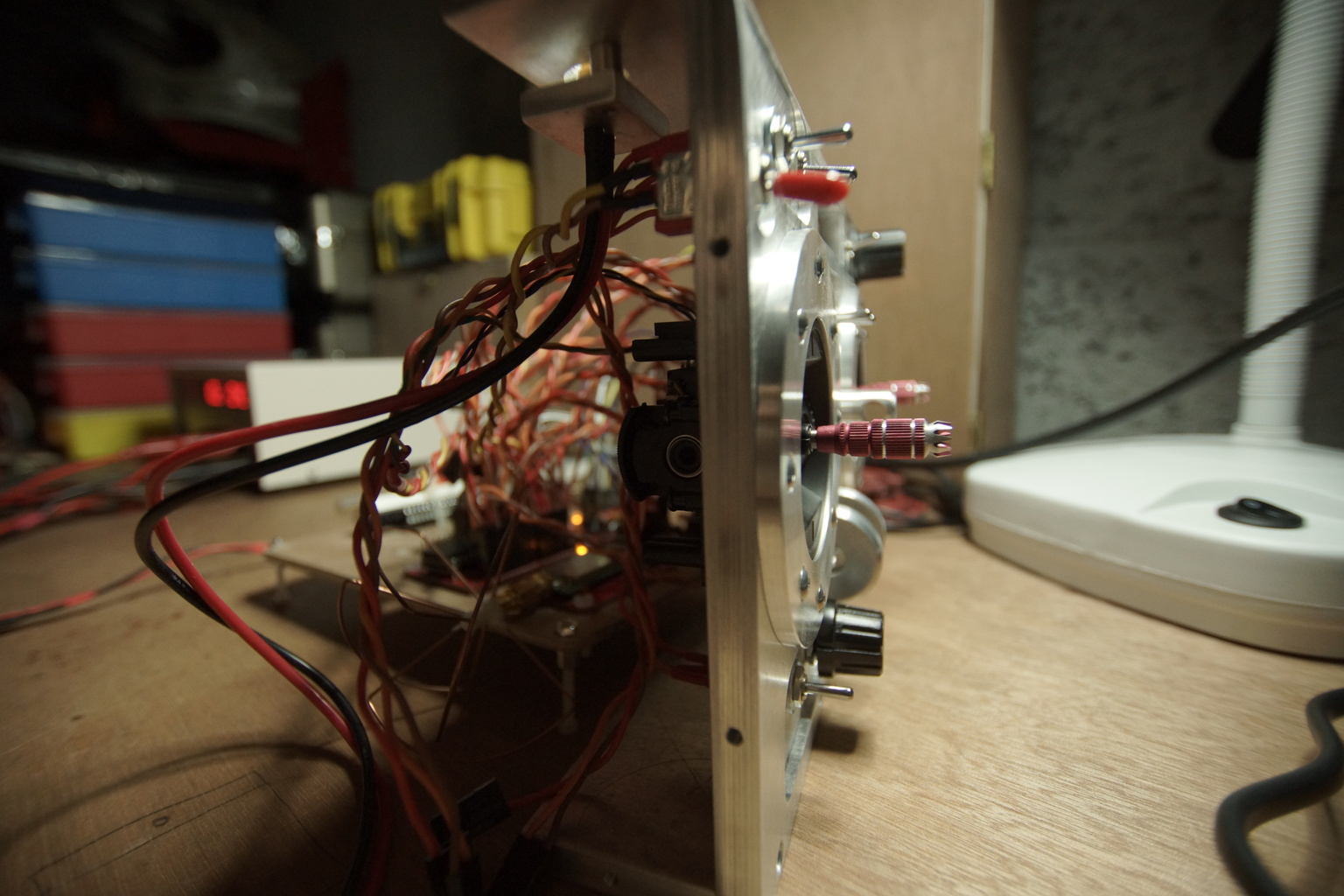
Donc j'ai décidé de fermer dans deux boites alu les mécanismes des deux manches, c'est par ailleurs plus propre comme ça. J'ai découpé, percé et plié une tôle alu 0.5mm d'épaisseur pour faire ces deux pièces:
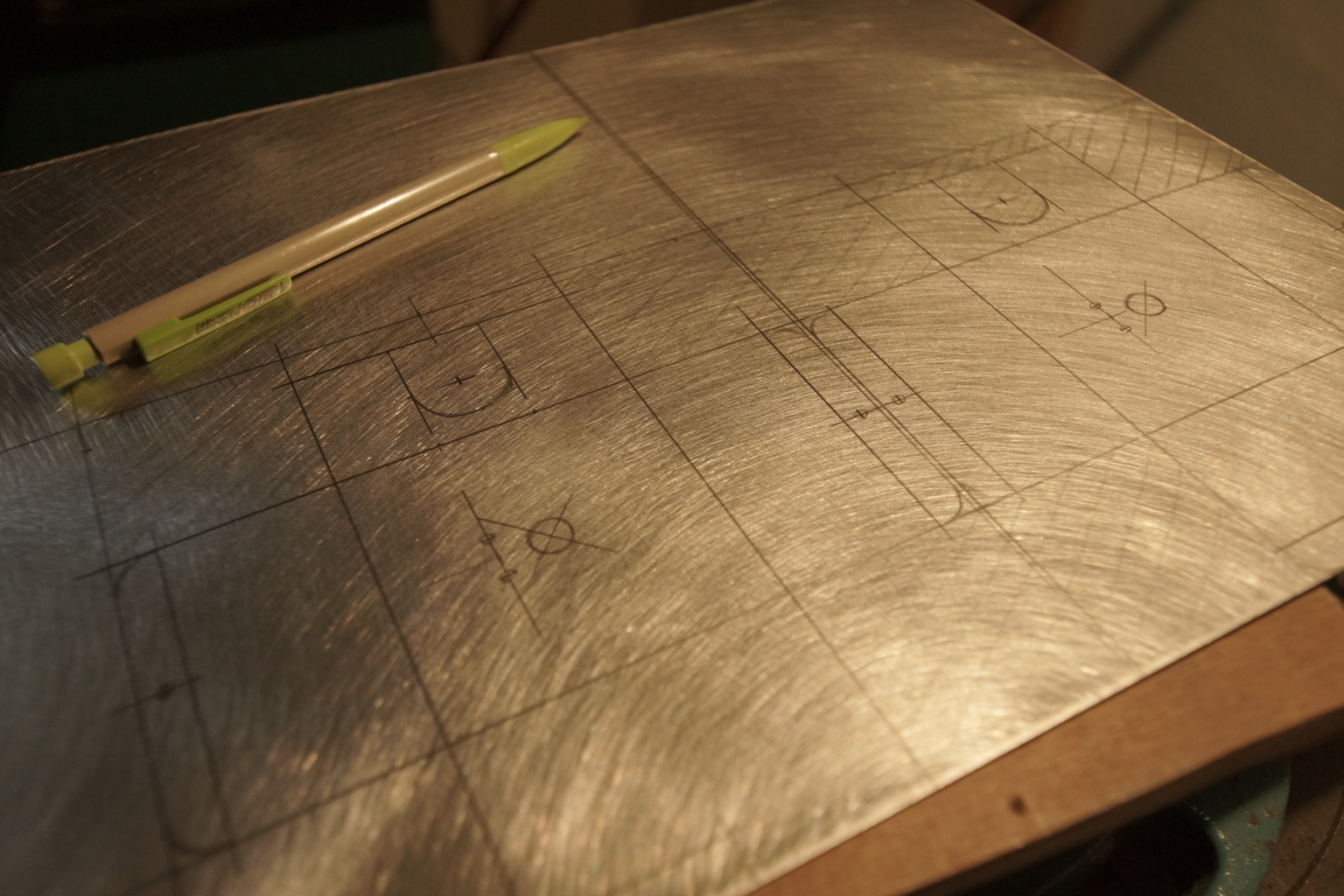
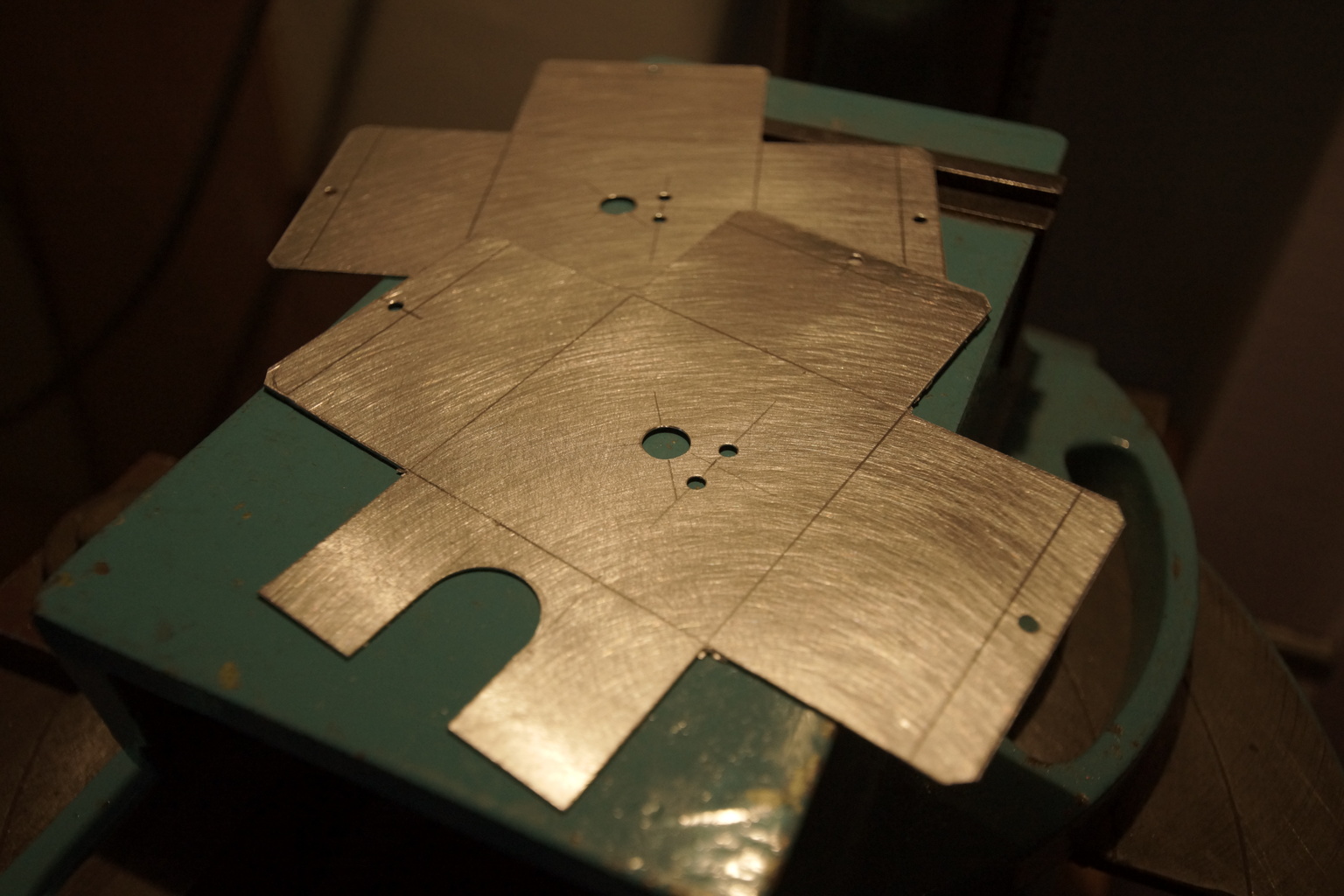


Ensuite j'ai graissé toutes les parties mobiles des manches (roulements, paliers, têtes de ressort, butées) avec de la graisse silicone de bonne marque avant de refermer le tout. J'ai fait dépasser les vis de fixation des manches à travers le boîtier de la radio pour venir mettre derrière 3 écrous freins M3 + 3 rondelles par manche.
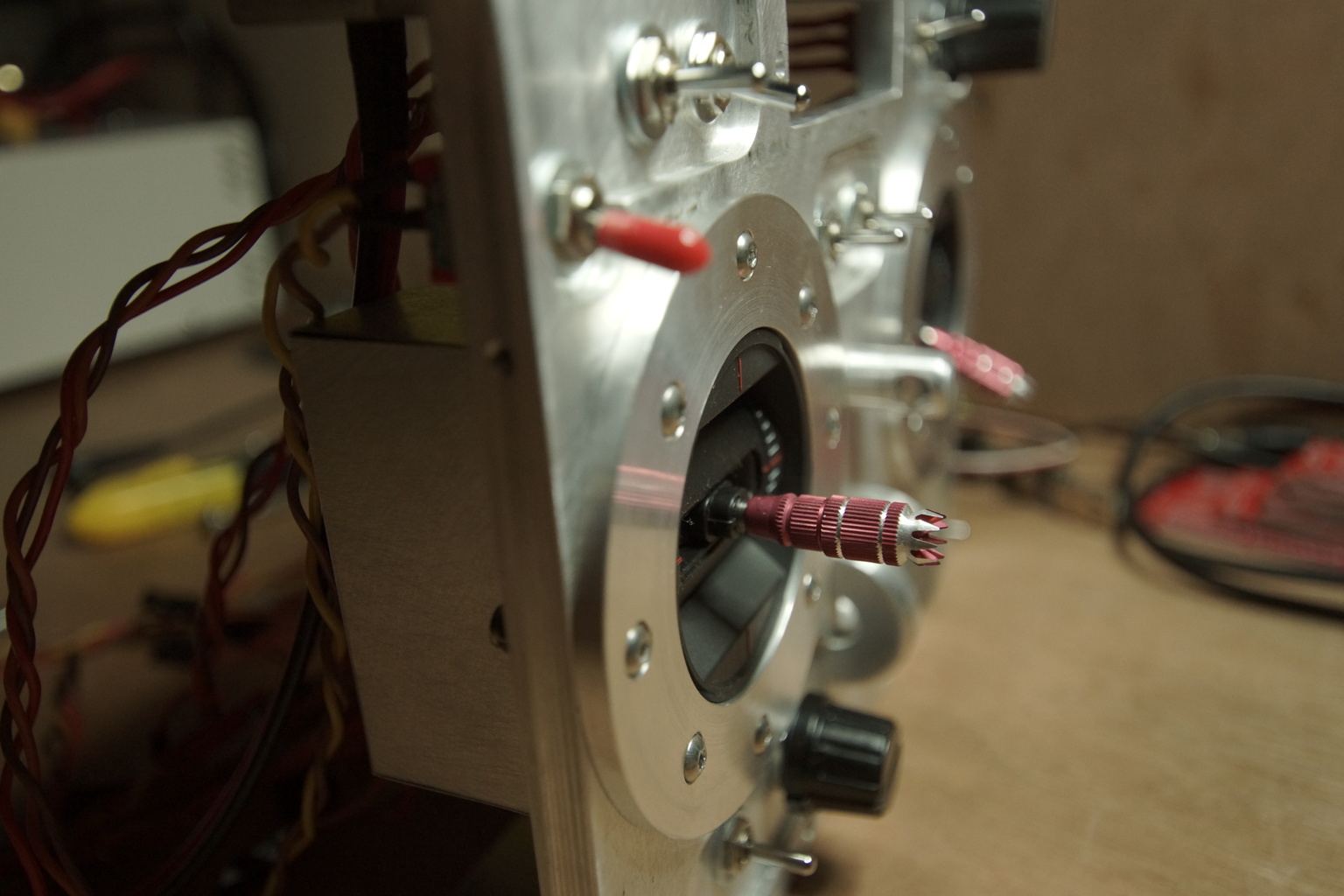

Cela m'a permis également de fixer correctement les câbles qui bougent au niveau des manches (ceux qui sortent maintenant au centre par le dessous), et de les envelopper dans une durite silicone fixée à l'aide d'un collier.
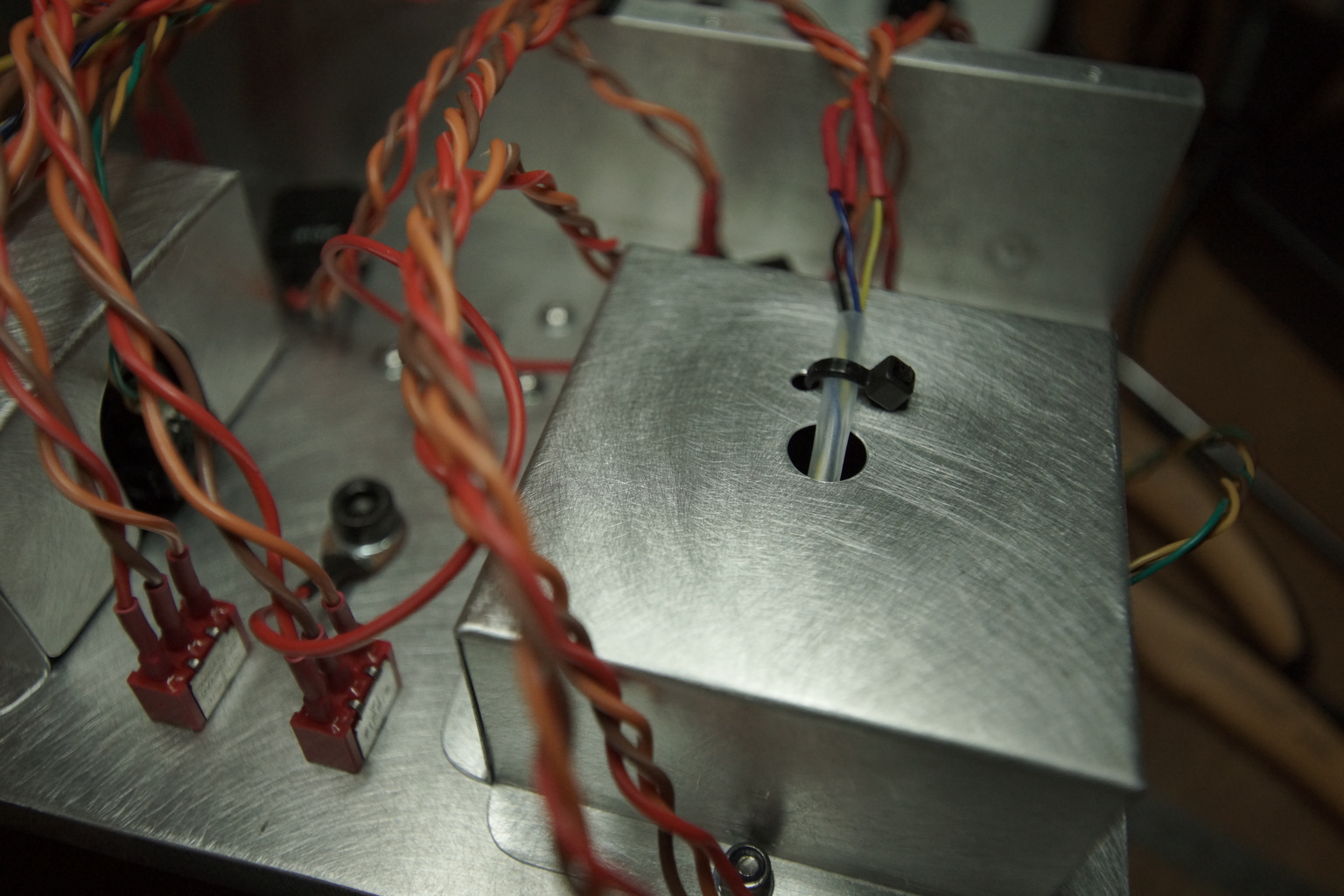
J'ai tout testé au niveau de l'interface (inters, potars, etc..), et de la tension (dropout du régulateur de tension notamment). J'attends maintenant de Hong Kong le PCB final pour l'automate programmable et l'affichage, ceux que j'utilise étant des versions en cours de développement. Ensuite je brancherais le tout et pourrait refermer le boîtier définitivement
Je me suis aperçu que je n'arriverais pas à refermer le boîtier de la radio tout en faisant des passages de câbles qui ne se prennent pas dans les mécanismes des manches.
Donc j'ai décidé de fermer dans deux boites alu les mécanismes des deux manches, c'est par ailleurs plus propre comme ça. J'ai découpé, percé et plié une tôle alu 0.5mm d'épaisseur pour faire ces deux pièces:
Ensuite j'ai graissé toutes les parties mobiles des manches (roulements, paliers, têtes de ressort, butées) avec de la graisse silicone de bonne marque avant de refermer le tout. J'ai fait dépasser les vis de fixation des manches à travers le boîtier de la radio pour venir mettre derrière 3 écrous freins M3 + 3 rondelles par manche.
Cela m'a permis également de fixer correctement les câbles qui bougent au niveau des manches (ceux qui sortent maintenant au centre par le dessous), et de les envelopper dans une durite silicone fixée à l'aide d'un collier.
J'ai tout testé au niveau de l'interface (inters, potars, etc..), et de la tension (dropout du régulateur de tension notamment). J'attends maintenant de Hong Kong le PCB final pour l'automate programmable et l'affichage, ceux que j'utilise étant des versions en cours de développement. Ensuite je brancherais le tout et pourrait refermer le boîtier définitivement
Qui est en ligne
Utilisateurs parcourant ce forum : Aucun utilisateur enregistré et 1 invité